-
Geleid opgedroogd kraanwater?
Bij het schoonmaken van het moederbord van de laptop waar koffie overheen gegaan was, moest ik denken aan de discussies op circuitsonline.net waarbij iemand vraagt waarmee een printplaat schoon te maken. Bijvoorbeeld omdat er koffie overheen gegaan is, maar ook bijvoorbeeld bij een gelekte batterij. Vaak wordt dan gedemineraliseerd water aangeraden, maar is dat nodig?…
-
Knoopcel in Tonercartridge?
Mijn vader heeft een printer, en als daar een probleem mee is wordt ik er uiteraard bijgeroepen. Dit keer was de knoopcel in de toner leeg. Da’s weer eens wat anders dan de gebruikelijke printerproblemen. De printer zegt “kan niet detecteren” en weigert te printen. Het batterijtje is een L521F (LR521 / SR63). Het levert…
-
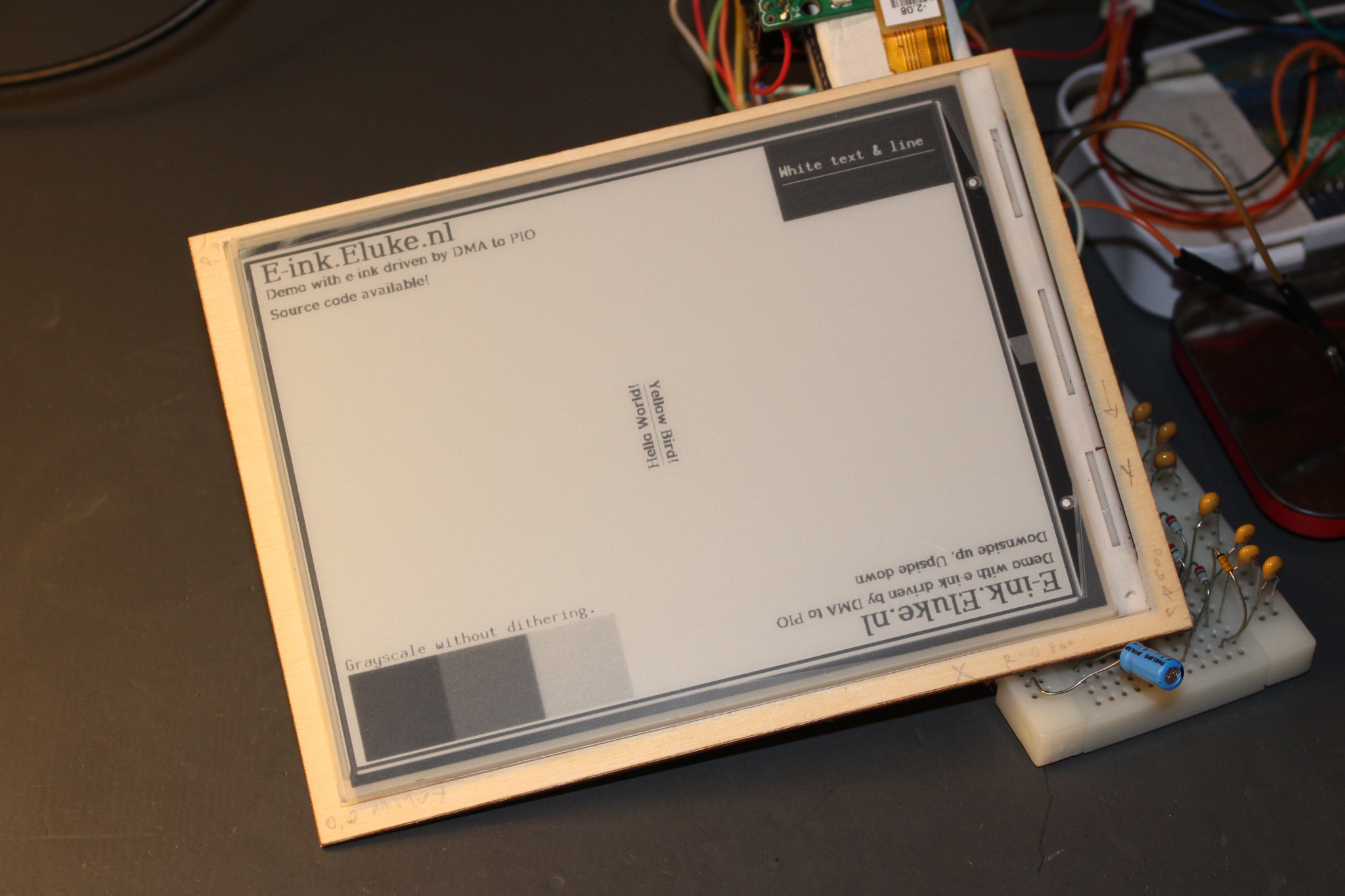
E‑ink aansturen met PIO & DMA
Eerder speelde ik met een e-ink scherm en kwam ik RAM tekort om het volledig aan te sturen. Maar zoiets als een RP2040 heeft RAM zat. Ook zou ik met de PIO het scherm aan kunnen sturen, zodat de processor ondertussen wat anders kan doen dan data door draadjes duwen. Dan zet ik de data…
-

E27 kruik
Het schroefdraad van de dop van een warmwaterkruik líjkt niet alleen erg op E27, er past zelfs daadwerkelijk een lamp in!
-
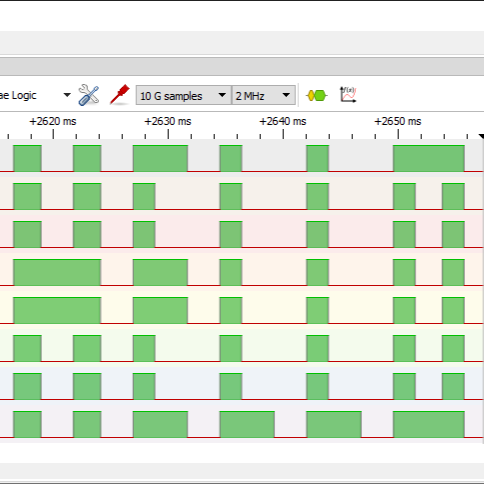
PIO patroongenerator principe
Wat is het tegenovergesteld van een logic analyser? Of eigenlijk “complementair aanvullend”, zoals een PNP en NPN transistor of een functie-generator en een oscilloscoop? Het blijkt een pattern generator te heten. Een soort digitale AWG dus. Zulk een ding is handig om een-of-ander digitaal signaal te genereren, bijvoorbeeld om te testen hoe een (deel)systeem daar…
-
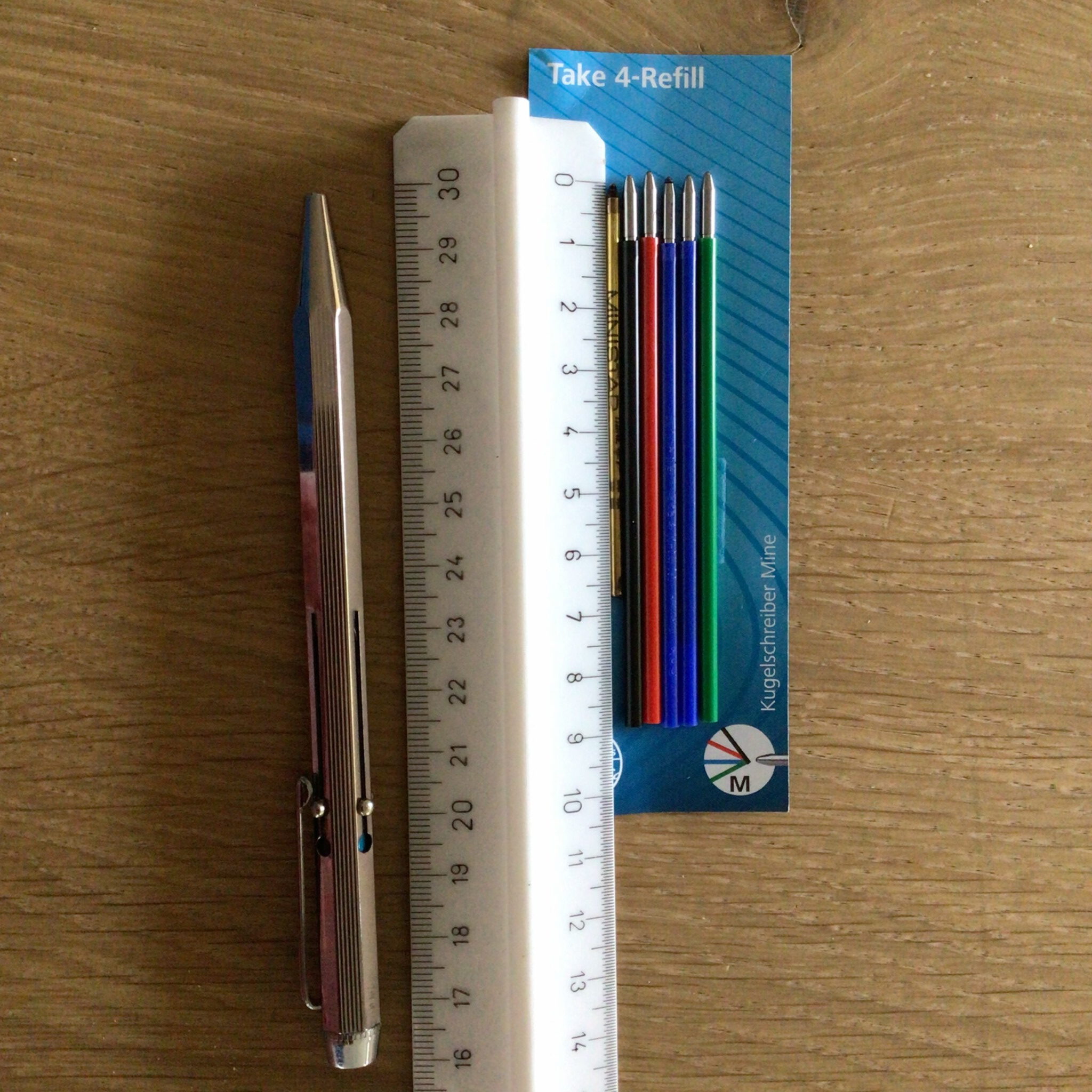
Vier-kleurenpen
Ik zocht nieuwe vullingen voor een vierkleurenpen. De pen komt ergens uit de jaren ’70 denk ik, en is via mijn opa en mijn moeder nu bij mij terechtgekomen. Gezien de ouderdom zijn de originele vullingen compleet uitgedroogd. Die wilde ik vervangen, zodat er weer mee te schrijven valt. Dat werd een langer verhaal, dus…
-
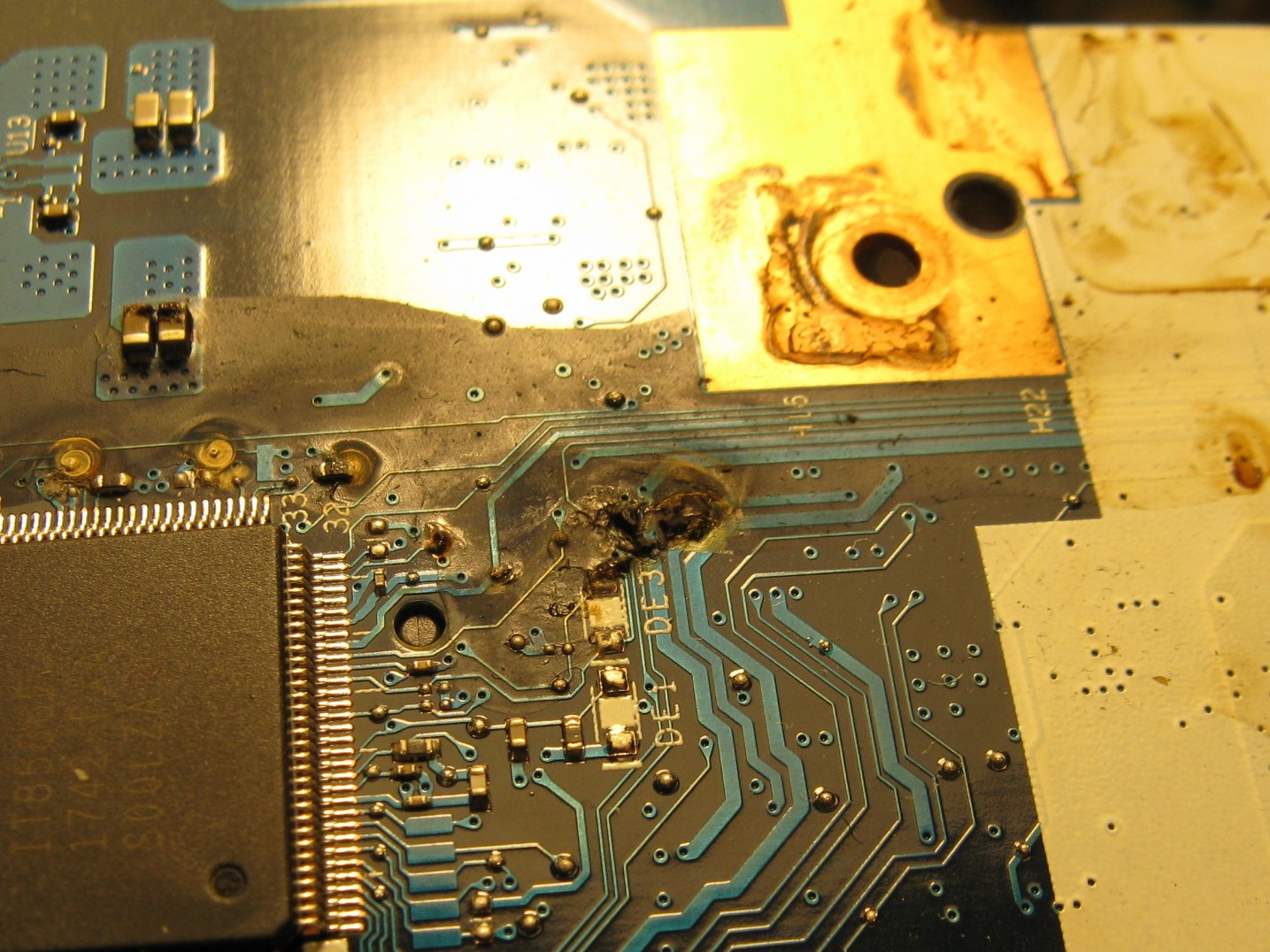
Board level laptop repair
A friend of mine spilled coffee over his laptop computer, after which it refused to turn on any more. Best thing to do is remove all power, but this laptop is a modern type with a built-in “non-removable” battery. So by the time the laptop got to me I expected corrosion. Still, I thought it…
-
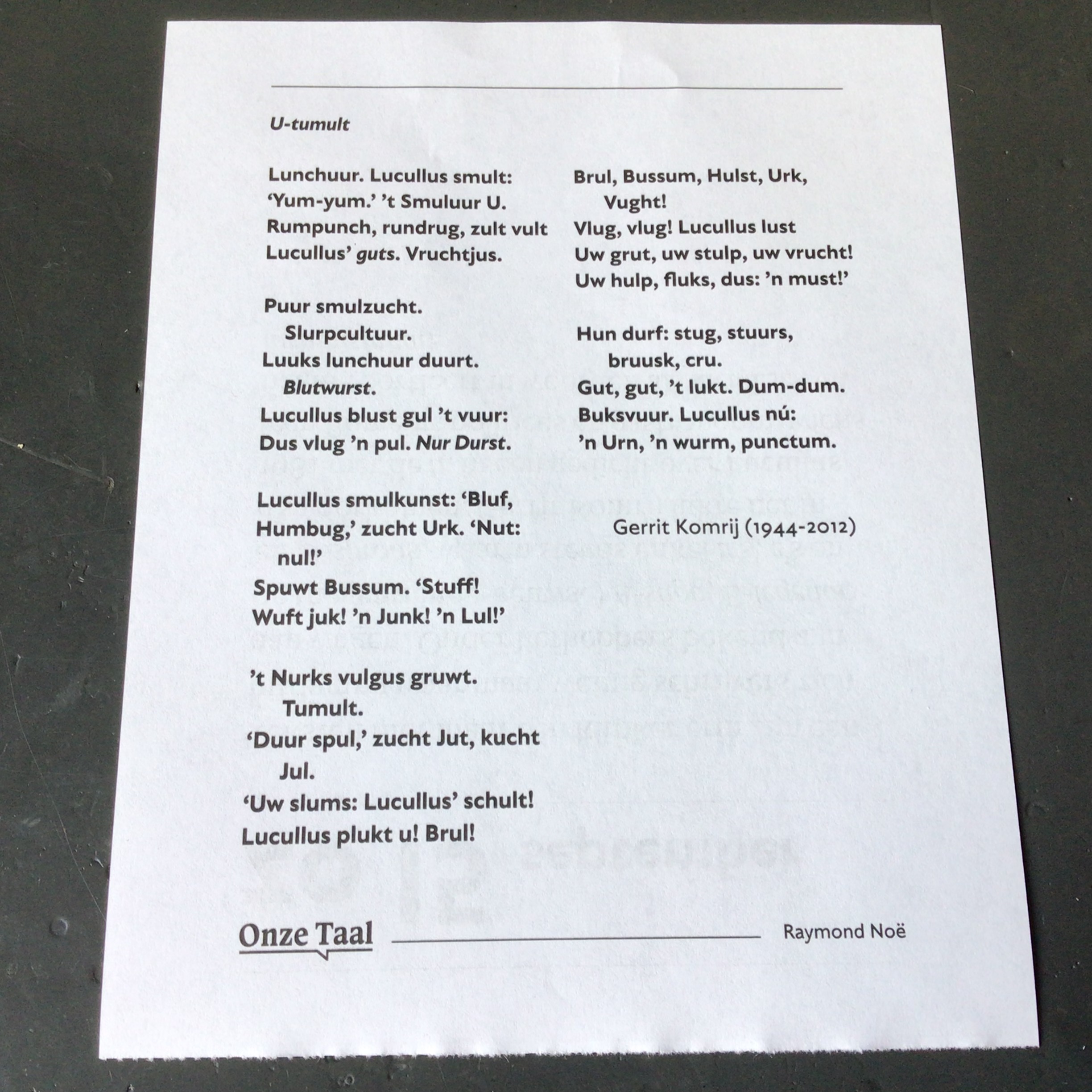
U-tumult
De onze-taal kalender had 2 weken geleden een gedichtje dat ik interessant vond in het kader van het eenklinkerverhaal
-
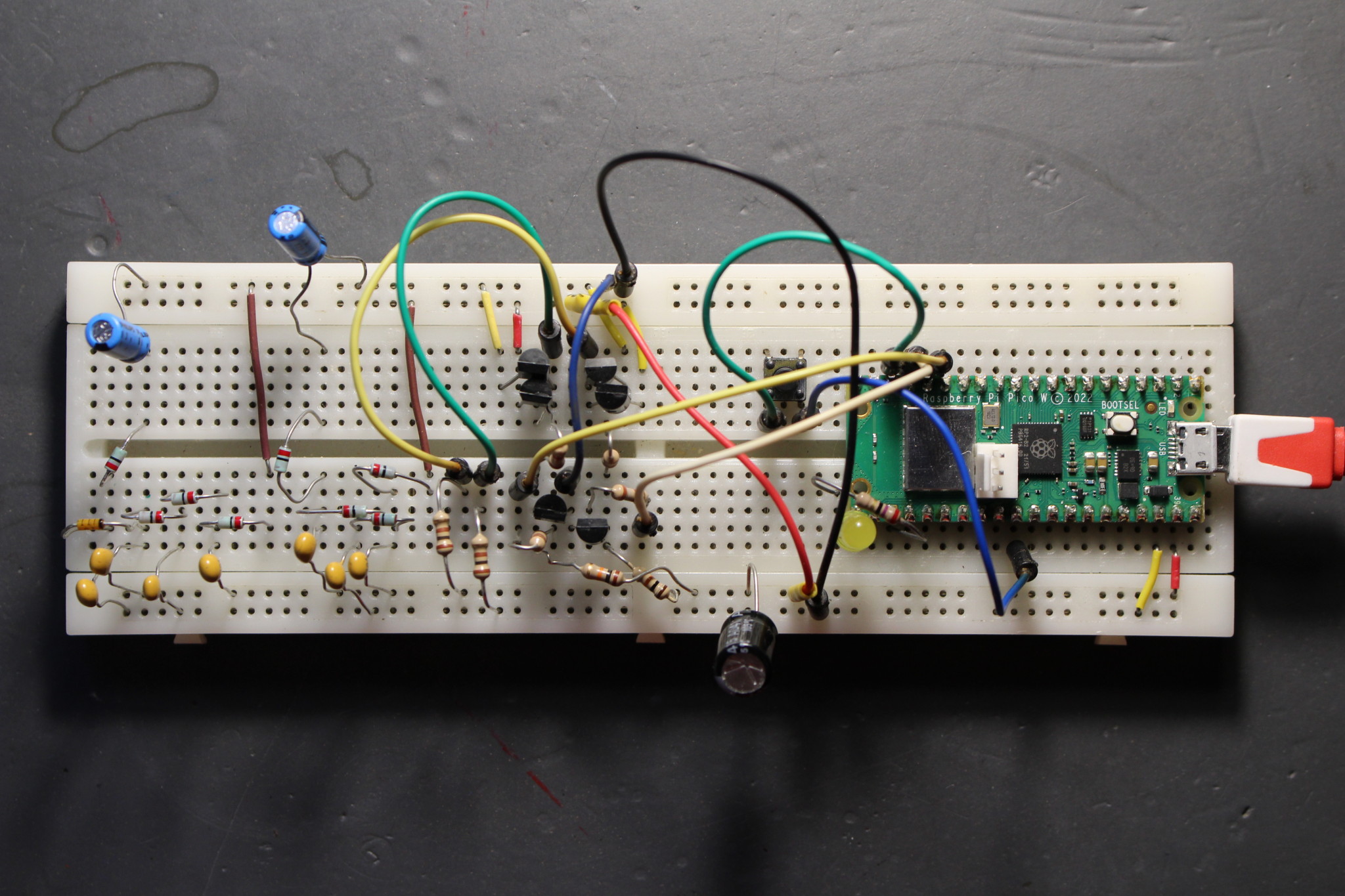
Pi Pico Pio Spielerij
Als eerste spielerij met de PIO van de Raspberry Pi Pico leek het me wel wat om de golfvorm voor een “Dickson Charge Pump” te maken. Een ladingspomp dus. Zoals het gelinkte artikel uitlegt gebruikt die 2 in fase verschoven blokgolven met een stukje dode tijd ertussen, samengevat in de hieronder overgenomen afbeelding: Op een…
-
Pico Debugprobe in Altoids-blikje
Omdat ik meer met de Raspberry Pi Pico wil gaan doen, is het wel handig om een debugprobe te hebben. Dat kan met een 2e Raspberry Pi Pico. Ik vond het wel passend die in te bouwen in een Altoids blikje. Het prijsstickertje heb ik er bewust op laten zitten, het blikje is ouder dan…
-
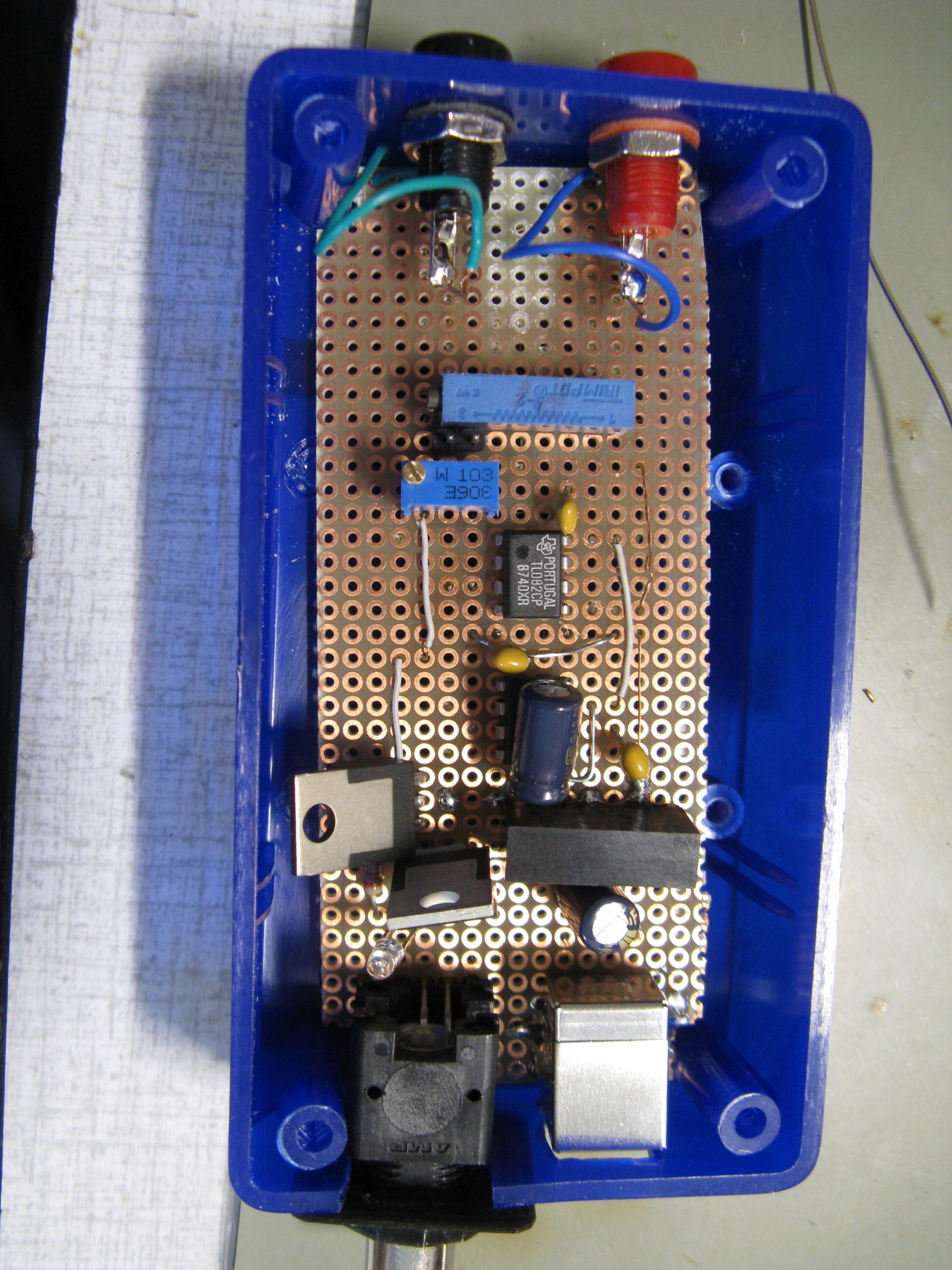
Differentiële probe met TL081
Je kent dat wel: van die situaties dat je met een oscilloscoop over een (shunt)weerstand in de positieve voedingslijn wilt meten, terwijl de ground van je schakeling al verbonden is met de ground van de oscilloscoop via de ground van je functie-generator. Het komt vaker voor dan je denkt 😛 Natuurlijk kun je dan 2…
