Category: project
-
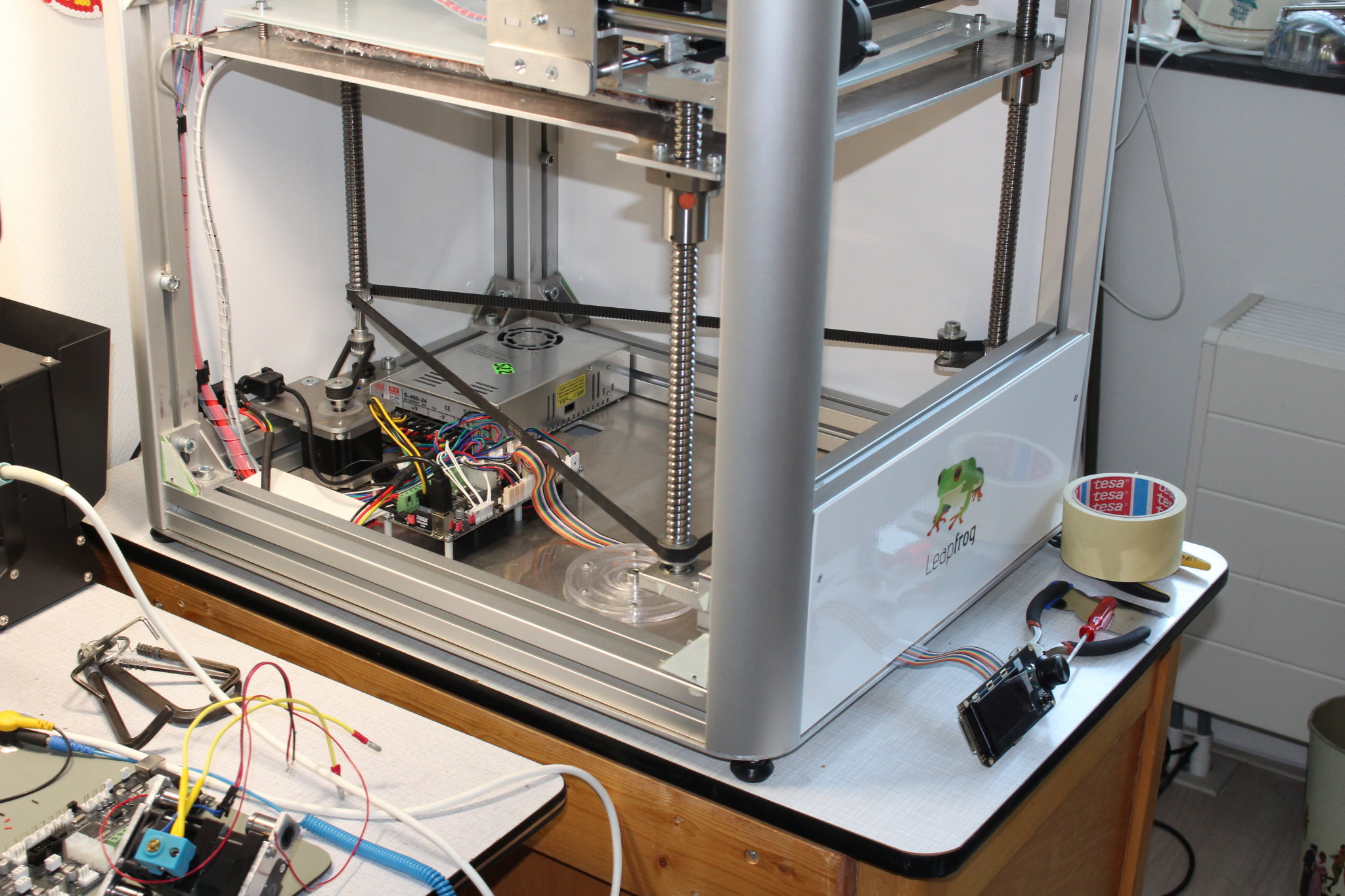
Klipper for Creatr Leapfrog
I’m experimenting with Klipper on my Leapfrog Creatr. One of the first things needed if you also want to do this, is a configuration file. This file describes which IO pin controls what, and contains settings. I made this file based on my printer and its Marlin configuration file. I did the configuration checks and…
-

Reflowven
Dit is zo’n projectje waar een deel van de lezers van mijn blog door hen gegeven of verkochte spullen in gaat herkennen 😉 Ik heb een reflow-oventje gebouwd op basis van een klein snackoventje dat ik kreeg van een vriend uit de MakerSpace. Deze blogpost is een soort bouwverslag (dus geen handleiding!). Ik heb de…
-
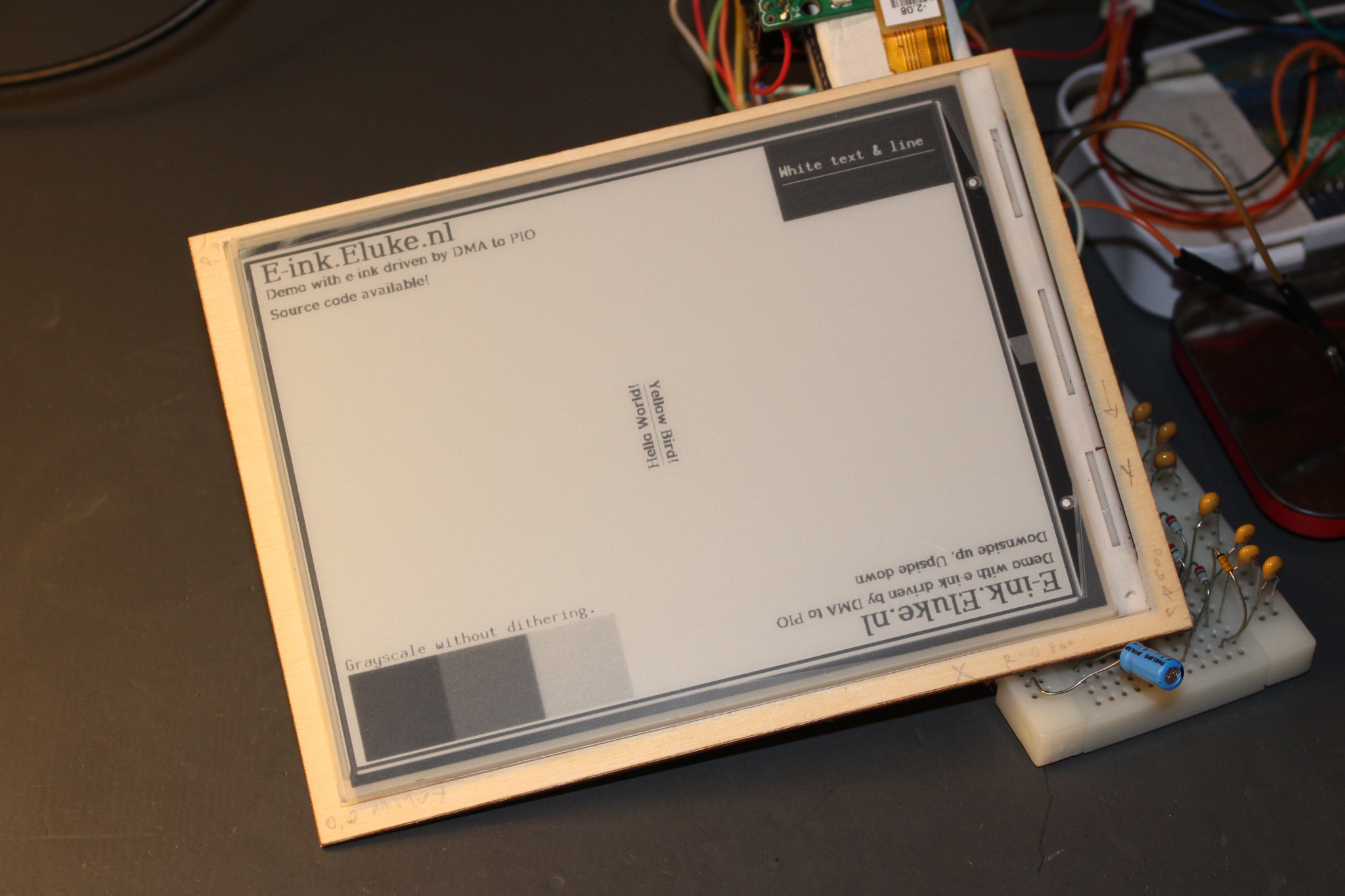
E‑ink aansturen met PIO & DMA
Eerder speelde ik met een e-ink scherm en kwam ik RAM tekort om het volledig aan te sturen. Maar zoiets als een RP2040 heeft RAM zat. Ook zou ik met de PIO het scherm aan kunnen sturen, zodat de processor ondertussen wat anders kan doen dan data door draadjes duwen. Dan zet ik de data…
-
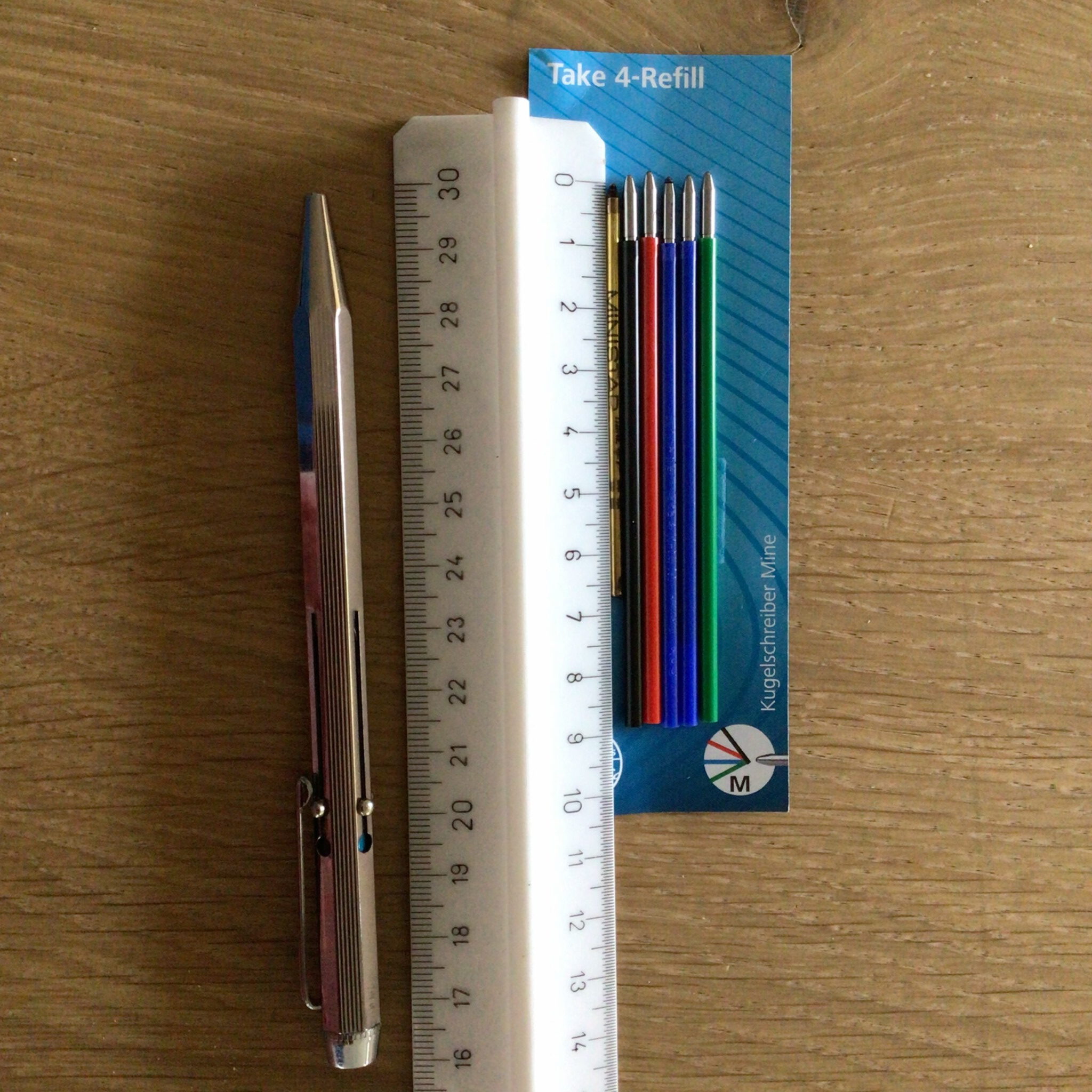
Vier-kleurenpen
Ik zocht nieuwe vullingen voor een vierkleurenpen. De pen komt ergens uit de jaren ’70 denk ik, en is via mijn opa en mijn moeder nu bij mij terechtgekomen. Gezien de ouderdom zijn de originele vullingen compleet uitgedroogd. Die wilde ik vervangen, zodat er weer mee te schrijven valt. Dat werd een langer verhaal, dus…
-
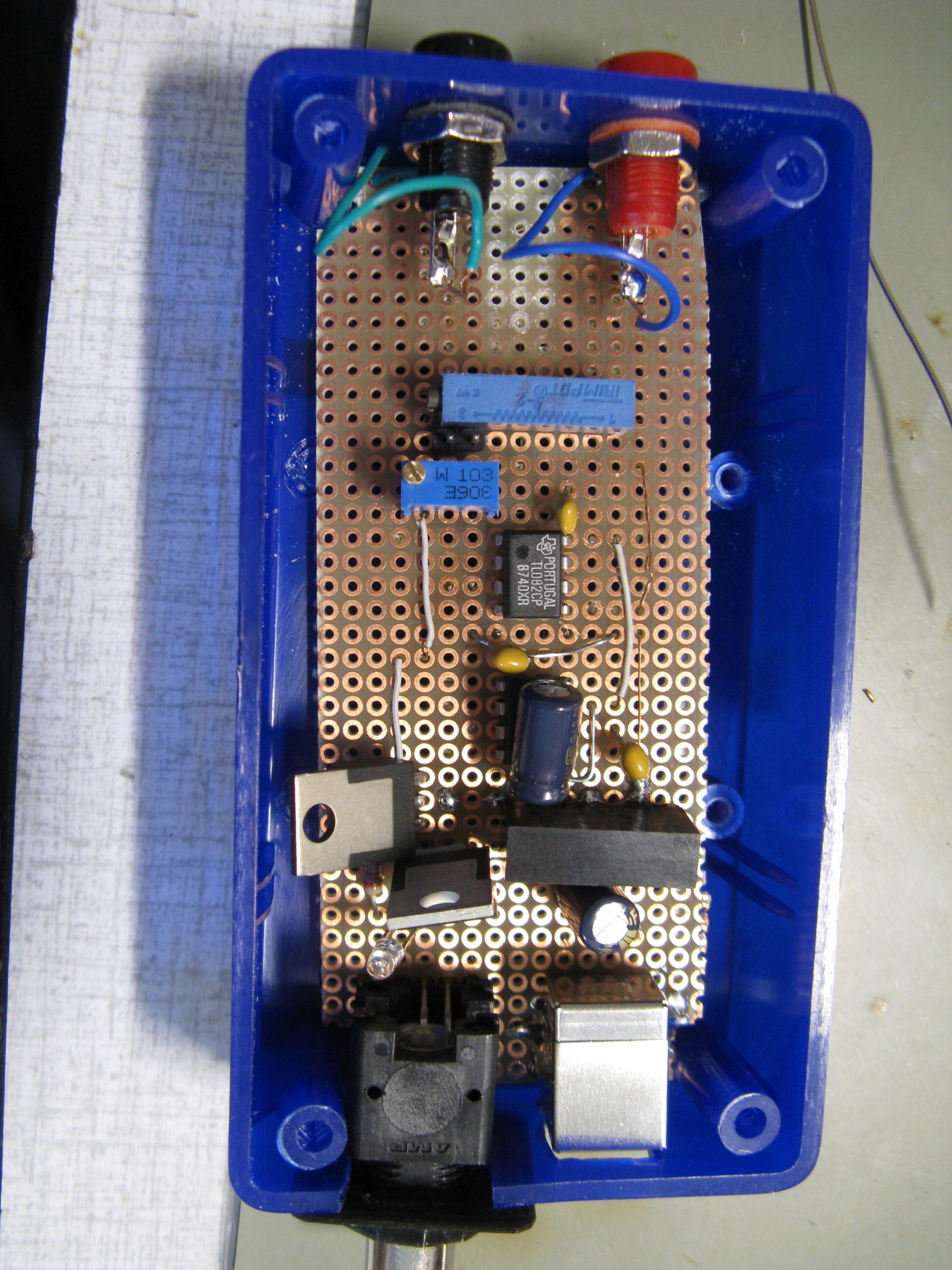
Differentiële probe met TL081
Je kent dat wel: van die situaties dat je met een oscilloscoop over een (shunt)weerstand in de positieve voedingslijn wilt meten, terwijl de ground van je schakeling al verbonden is met de ground van de oscilloscoop via de ground van je functiegenerator. Het komt vaker voor dan je denkt 😛 Natuurlijk kun je dan 2…
-

Litronix horloge in Seiko kast
Het is eigenlijk opvallend hoe veel klokken ik maak, voor iemand met weinig tijdsbesef. Anyway. Toen ik een advertentie plaatste op CircuitsOnline op zoek naar een horlogekast of een defect horloge voor het neonlampjes-horloge kreeg ik daar leuke reacties op. Zo boden mede-CO-ers me onder andere een Seiko horlogekast en een bijzonder litronix displaytje aan.…
-
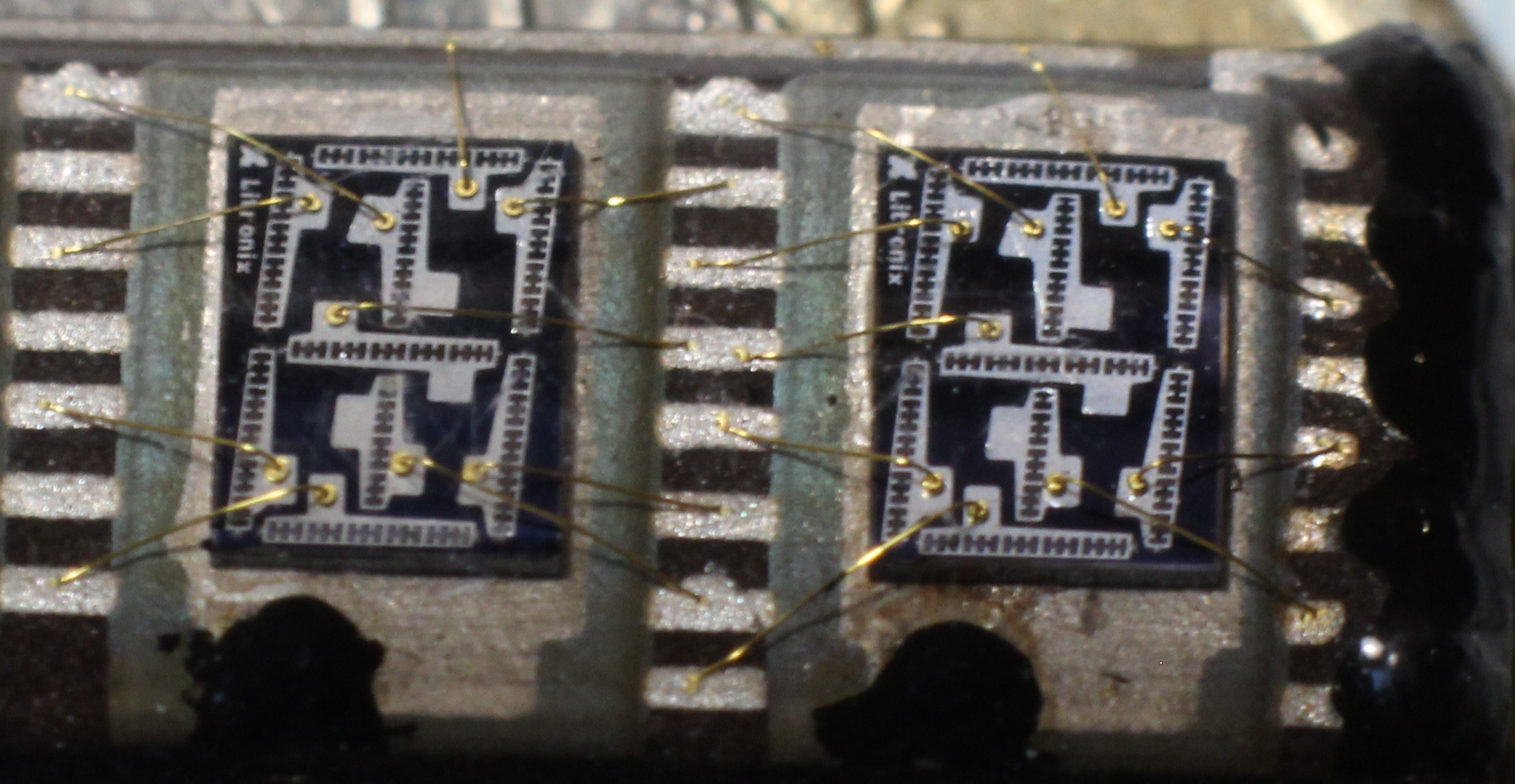
Bijzonder Litronix display
Ik vind dit een heel mooi en bijzonder LED-displaytje. Het is geproduceerd door Litronix, en het is ouder dan dat ik ben, al weet ik niet wanneer het exact geproduceerd is. Vermoedelijk ergens in de jaren ’70. Hier een aantal foto’s (klik of tik voor een vergroting) Het display is ongeveer 19 mm lang en…
-

Neon Watch design-information
Specially for those desiring to build their own neon-indicator watch, or for those who just want to know how it’s made (Bunch a’ enginèèrds! 😉 ). In this blogpost I’ll share the design files. (Ook in het Nederlands beschikbaar) For those that rather watch the outside of the watch: here is a link to the…
-
Neonhorloge ontwerp gegevens
Speciaal voor hen die zelf ook een neonlampjes-horloge willen bouwen, of diegenen die gewoon willen weten hoe het in elkaar zit (stelletje ingenienerds! 😉 ), zal ik in deze post de ontwerp-bestanden delen. (Also available in English). Voor wie liever naar de buitenkant kijkt, hier is een linkje naar de blogpost over de buitenkant.
-
Optical data-transmission
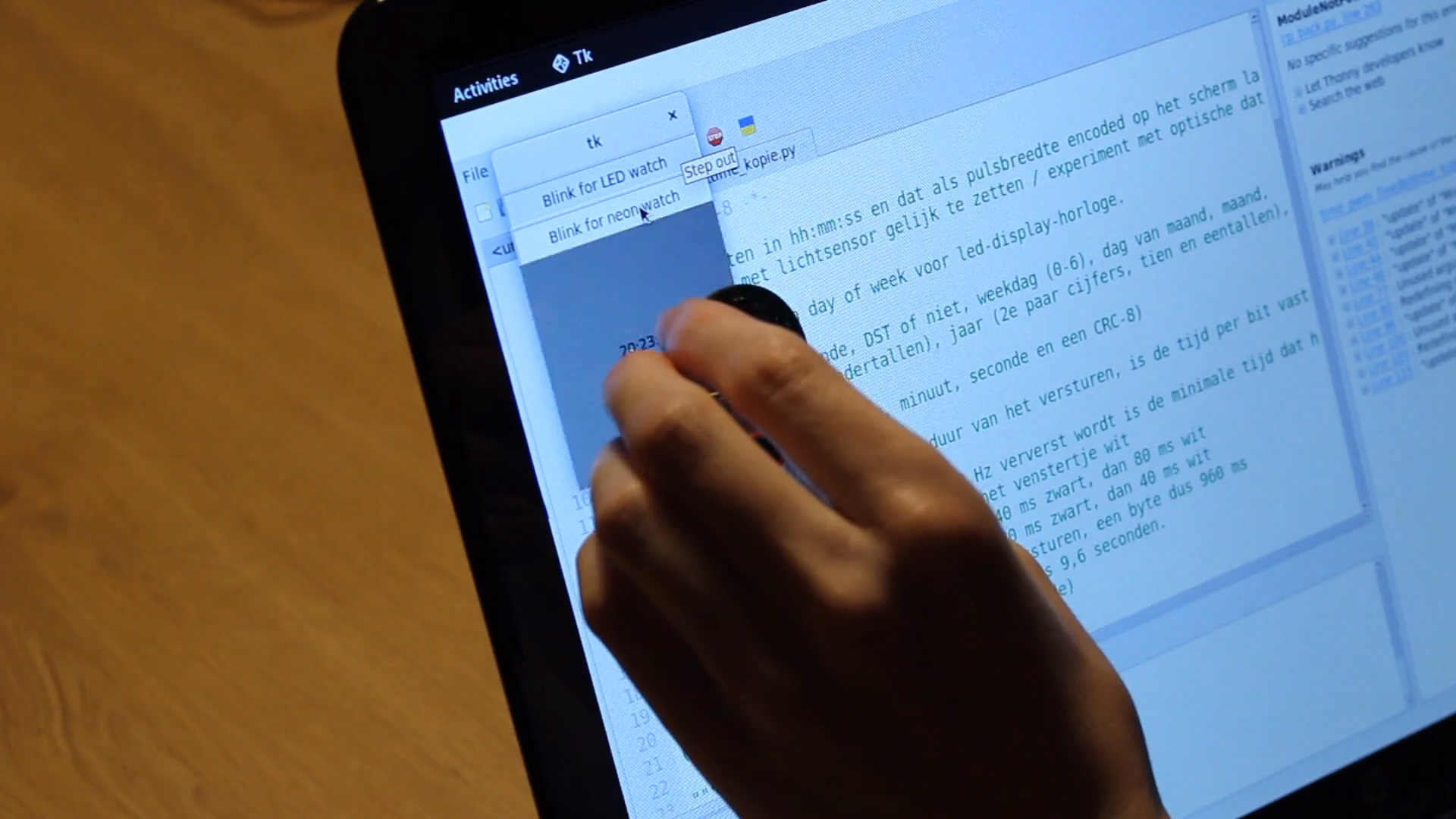
In the post about the neon watch I mentioned the neon watch gets set to the correct time by a computer program that flashes the screen to send the time. Since that post I have modified my ‘lichtwekker’ (Light-up alarm clock / lineair clock) so that too can be used to set the neon watch.…
-
Optische data-transmissie
Of is dat “Tijd-transmissie”? In de post over het neonhorloge staat dat het horloge gelijk gezet wordt door middel van een computerprogramma dat het scherm laat opflitsen om zo de huidige tijd over te dragen aan het horloge. Sinds de post over het neonhorloge heb ik mijn lichtwekker aangepast zodat ik ook daarmee het neonhorloge…