Category: zweefmagneet
-

Eenvoudige afstands-sensor met LED en lichtsensor.
Bij de zweefmagneet gebruik ik een hallsensor om de afstand tot de magneet te meten. Deze sensor meet magnetische veldsterkte en is daarom eveneens gevoelig voor het veld van de elektromagneet, en niet alleen de permanente magneet waarvan de afstand gemeten moet worden. Op zich geeft dat geen probleem in de praktijk, maar het is…
-
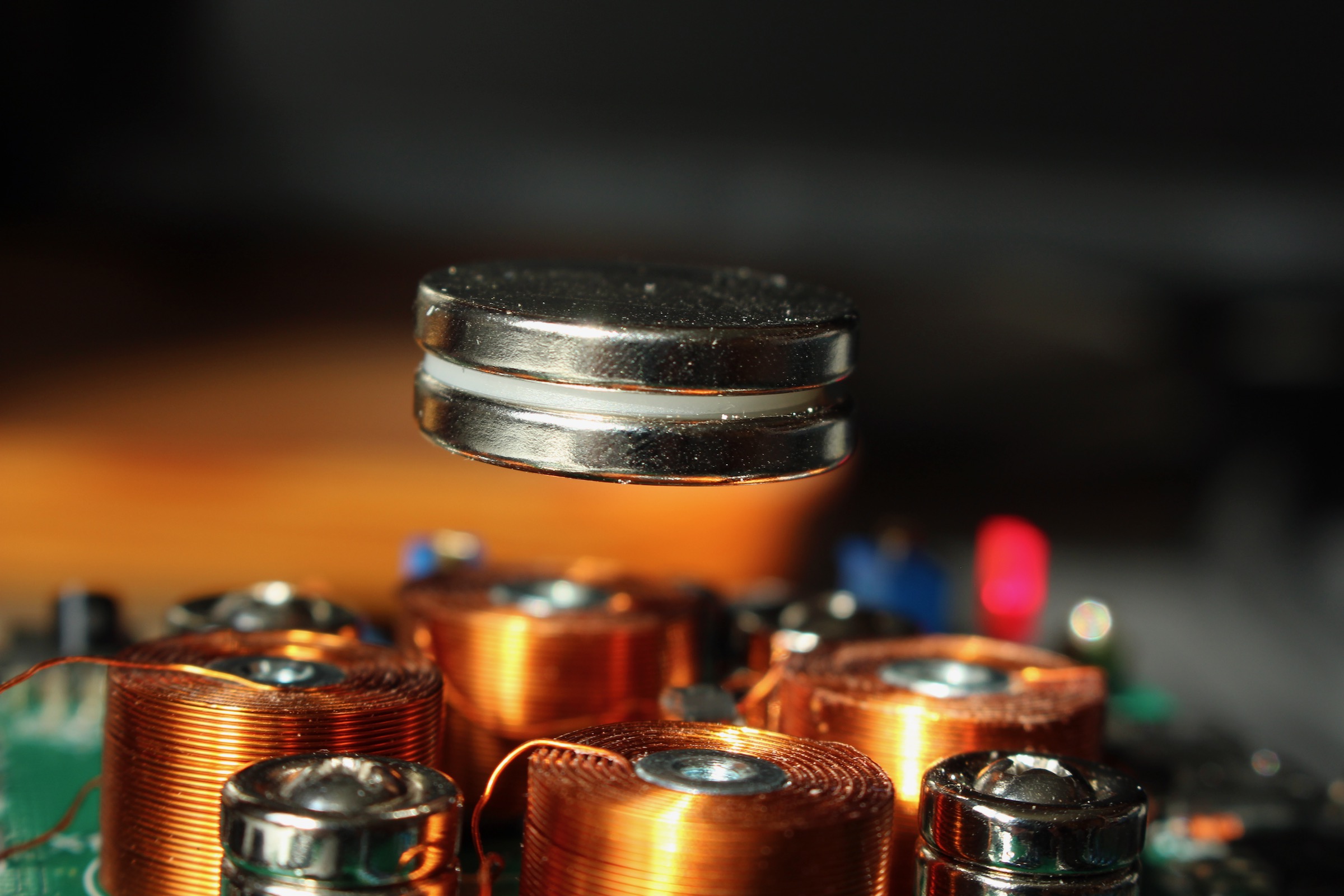
‘Inverse zweefmagneet’ bouwpakket gekocht en gebouwd
Wie mijn oude site kent, herinnert zich misschien nog wel de zweefmagneet. Daarbij zweeft een magneet onder een elektromagneet. Het kan ook andersom: een magneet boven een aantal elektromagneten laten zweven. Ik heb een bouwpakketje gekocht dat (na het in elkaar te knutselen) een magneet boven een stel elektromagneten laat zweven. Het bouwpakketje komt aan…
-
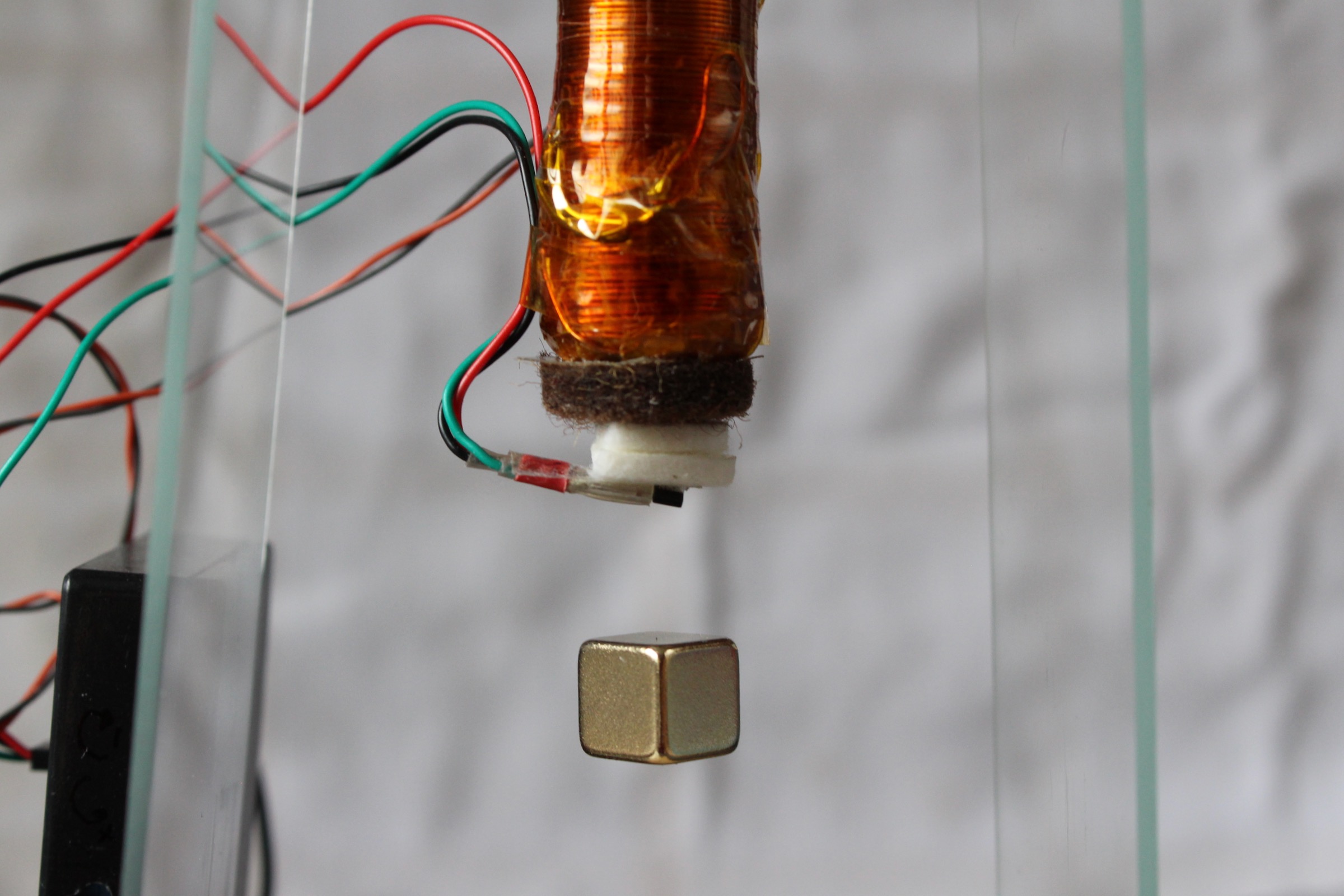
Zweefmagneet met opamps
Wie mijn oude site kent, herinnert zich misschien nog wel de zweefmagneet. Daarbij zweeft een magneet onder een elektromagneet. Daarbij wordt een sensor en een regeling gebruikt om ervoor te zorgen dat de magneet blijft zweven. Die regeling kan met een microcontroller, zoals het elektuur-artikel waar ik me destijds (in 2008 !) op baseerde. Het…