Category: kort
-
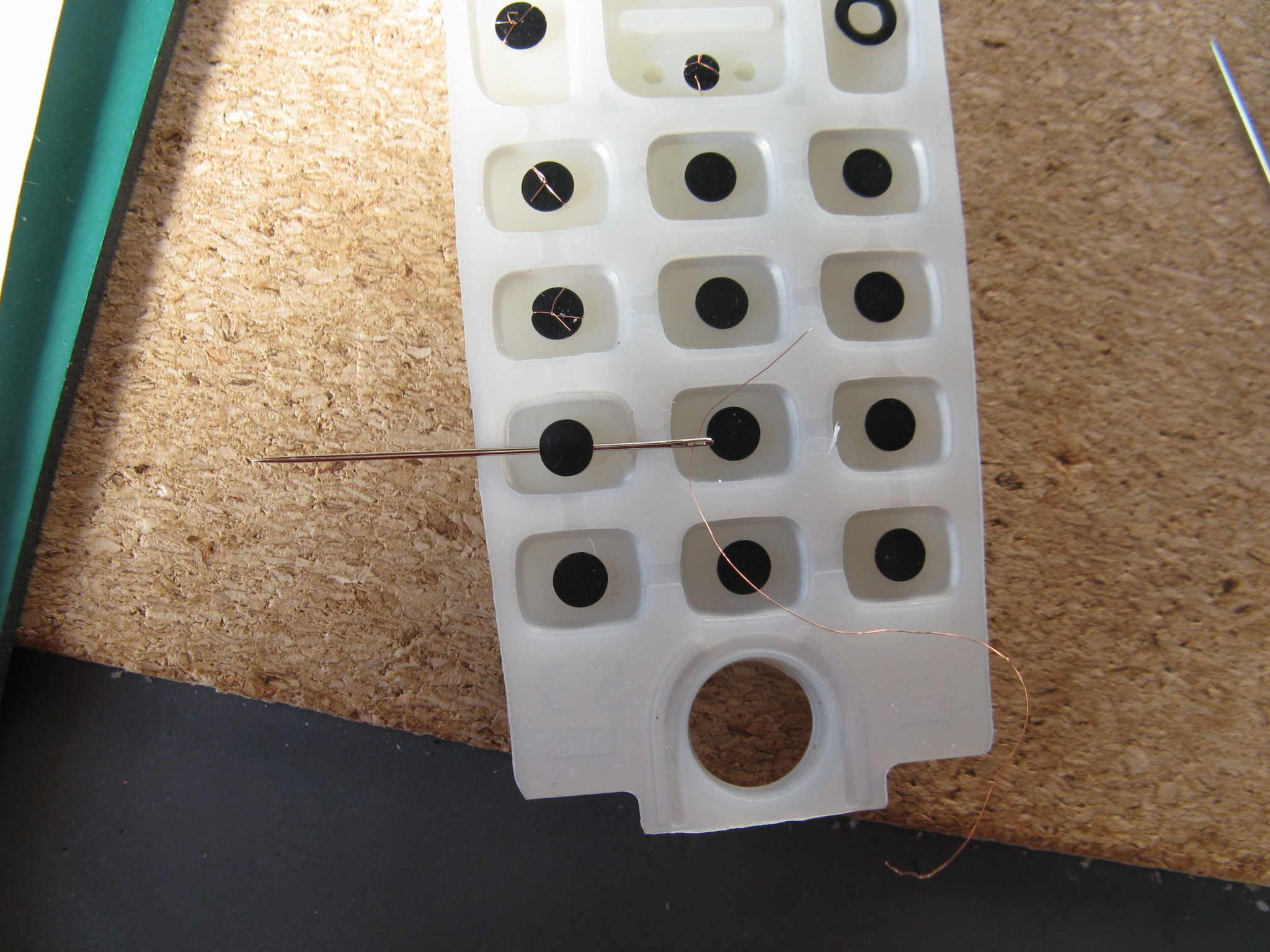
Needle & thread keypad repair
One of the dect phones stopped responding to keypresses, even when pressing really hard. This is a know problem with rubber keypads, it also occurs in remote controls etc. A keypad swapped from another phone worked fine, so it was the ‘rubber mat’ and not the board. I tried repairing the rubber mat by “painting”…
-

Draadloos toetsenbord teardown
Helaas een permanente teardown: de doorgesneden foliekabel laat zich niet herstellen. De oorspronkelijke klacht was dat de backspace-toets niet werkte en er leek koffie of cola of iets dergelijks onder specifiek die toets te zitten. Schoonmaken zonder uit elkaar halen leidde tot water tussen de folie-lagen. Ongeduld bij het laten drogen daarvan leidde tot verdere…
-
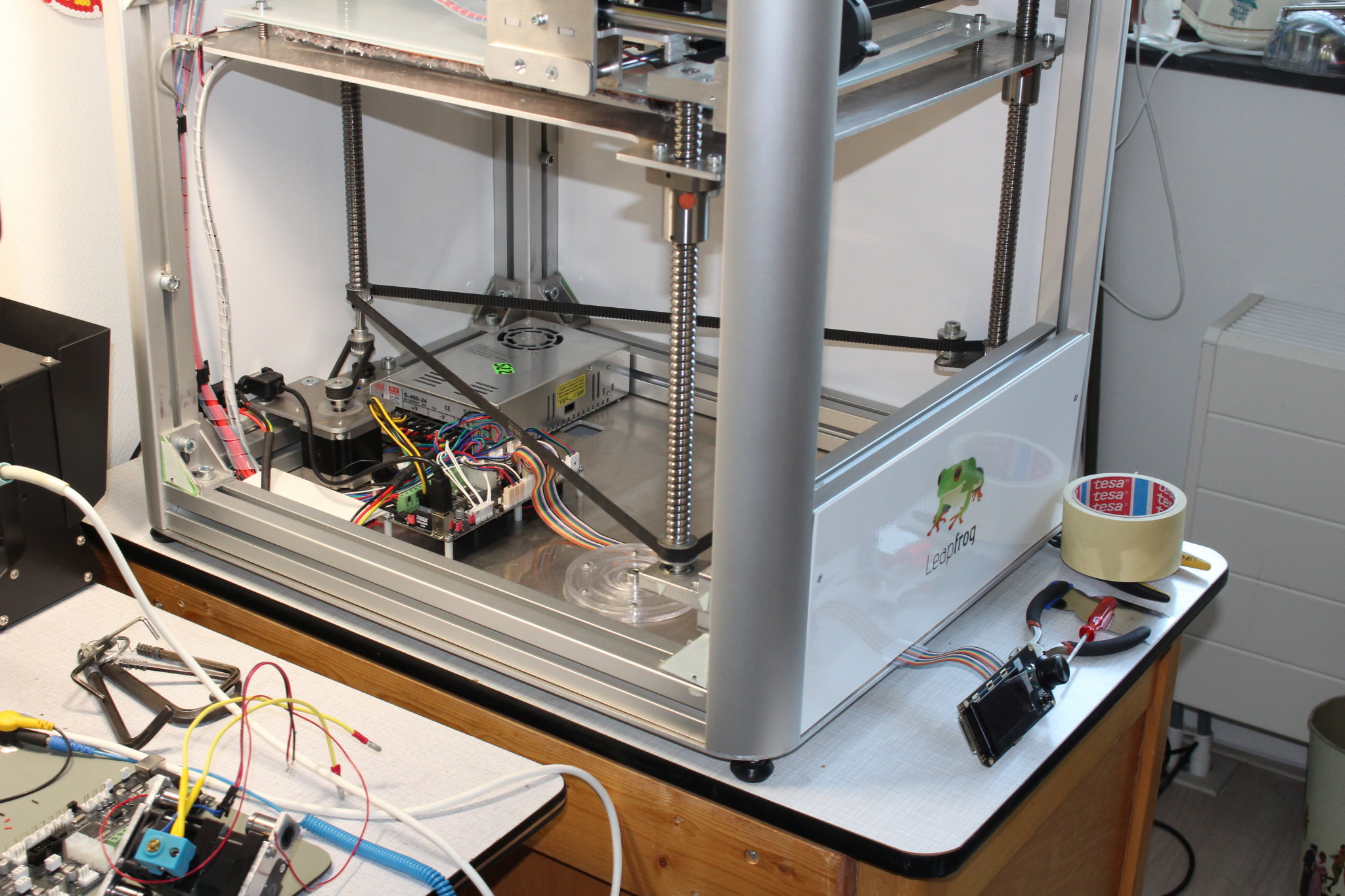
Klipper for Creatr Leapfrog
I’m experimenting with Klipper on my Leapfrog Creatr. One of the first things needed if you want to do this, is a configuration file. This file describes which IO pin controls what, and contains settings. I made this file based on my printer and it’s Marlin configuration file. I did the configuration checks and made…
-
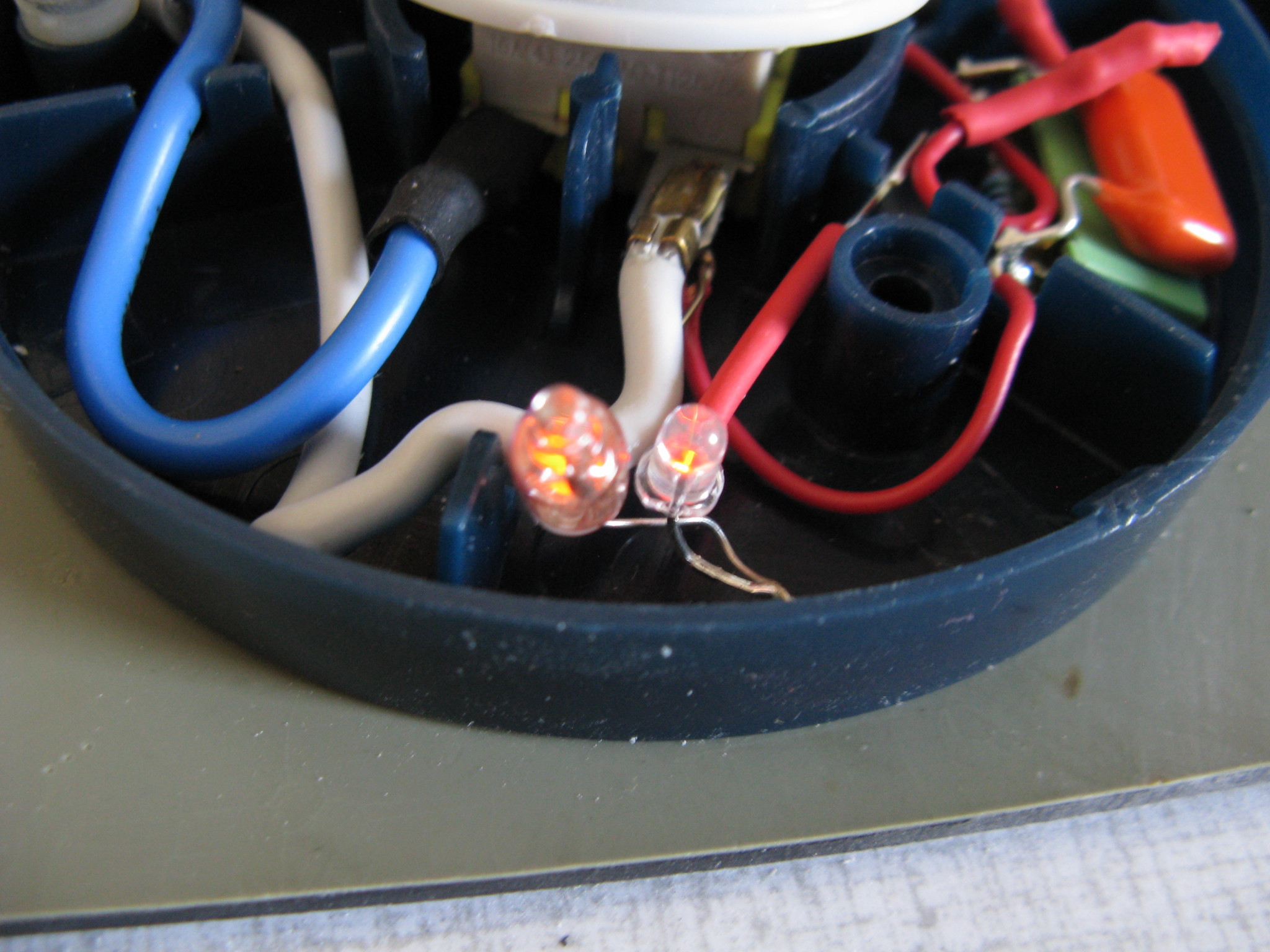
Knipperende schakelaar
Een neonlampje kan gebruikt worden om een oscillator te maken, zonder verdere (actieve) componenten. Een weerstand, condensator, en eventueel een diode is alles dat nodig is. De diode in geval de schakeling met wisselspanning gevoed wordt: De oscillator werkt alleen op gelijkspanning. Daardoor zal ook slechts 1 van de 2 elektroden van het neonlampje licht…
-
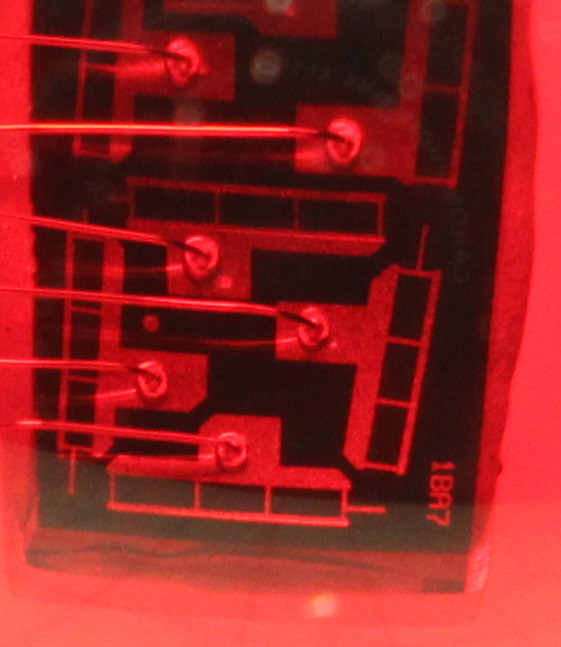
Mooi led displaytje
Eerder schreef ik over een mooi litronix displayje, maar deze post gaat over de QDSP 6064 van Hewlet Packard. Dezelfde HP als van Mooie Meetapparatuur & Prijzige Printerinkt. Het is een bubble-display, zo genoemd vanwege de lens “bubbels” voor de cijfers. Waarschijnlijk is het van een recenter productiedatum dan het litronix display: onderop staat “9912”…
-
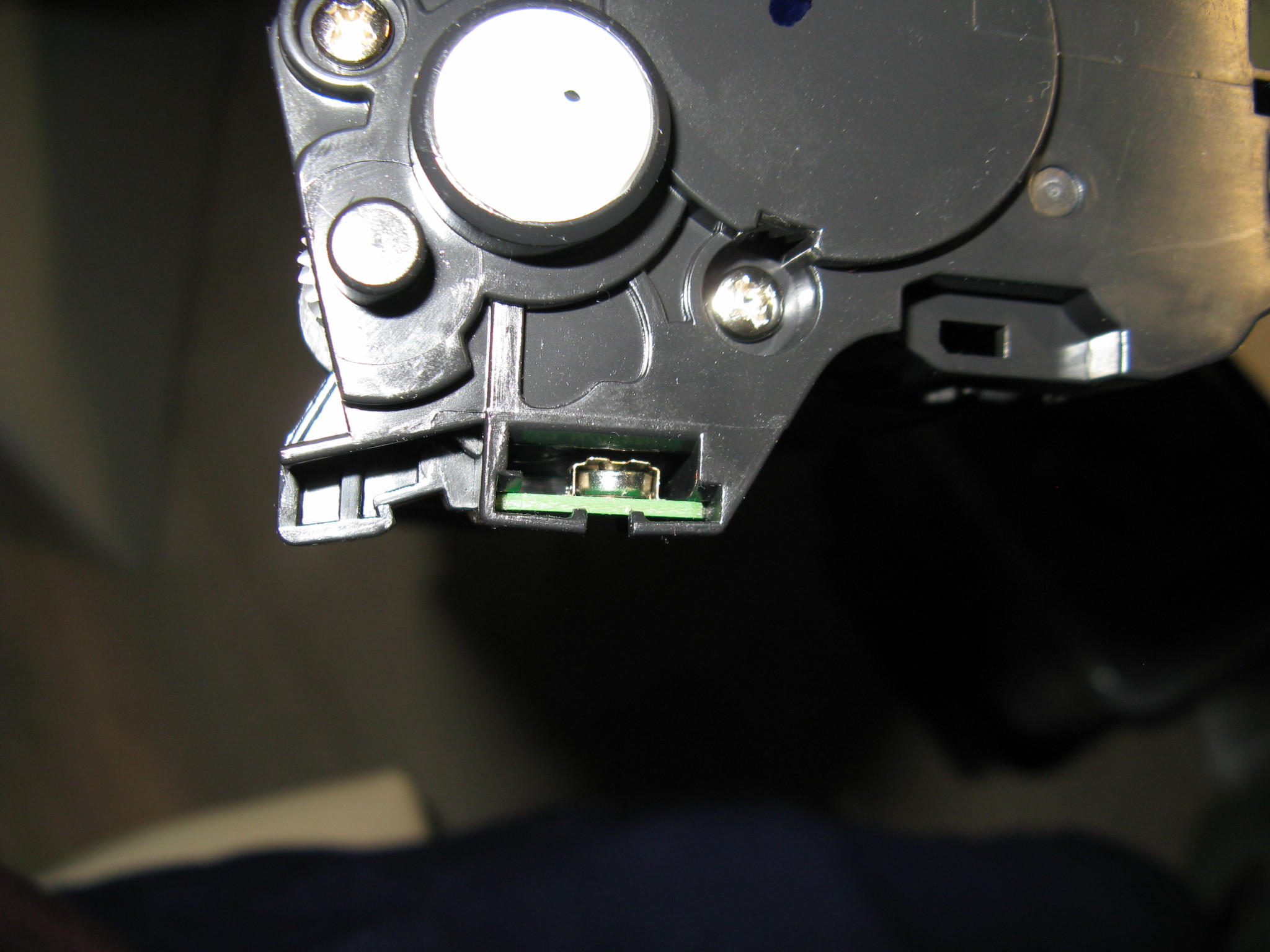
Knoopcel in Tonercartridge?
Mijn vader heeft een printer, en als daar een probleem mee is wordt ik er uiteraard bijgeroepen. Dit keer was de knoopcel in de toner leeg. Da’s weer eens wat anders dan de gebruikelijke printerproblemen. De printer zegt “kan niet detecteren” en weigert te printen. Het batterijtje is een L521F (LR521 / SR63). Het levert…
-
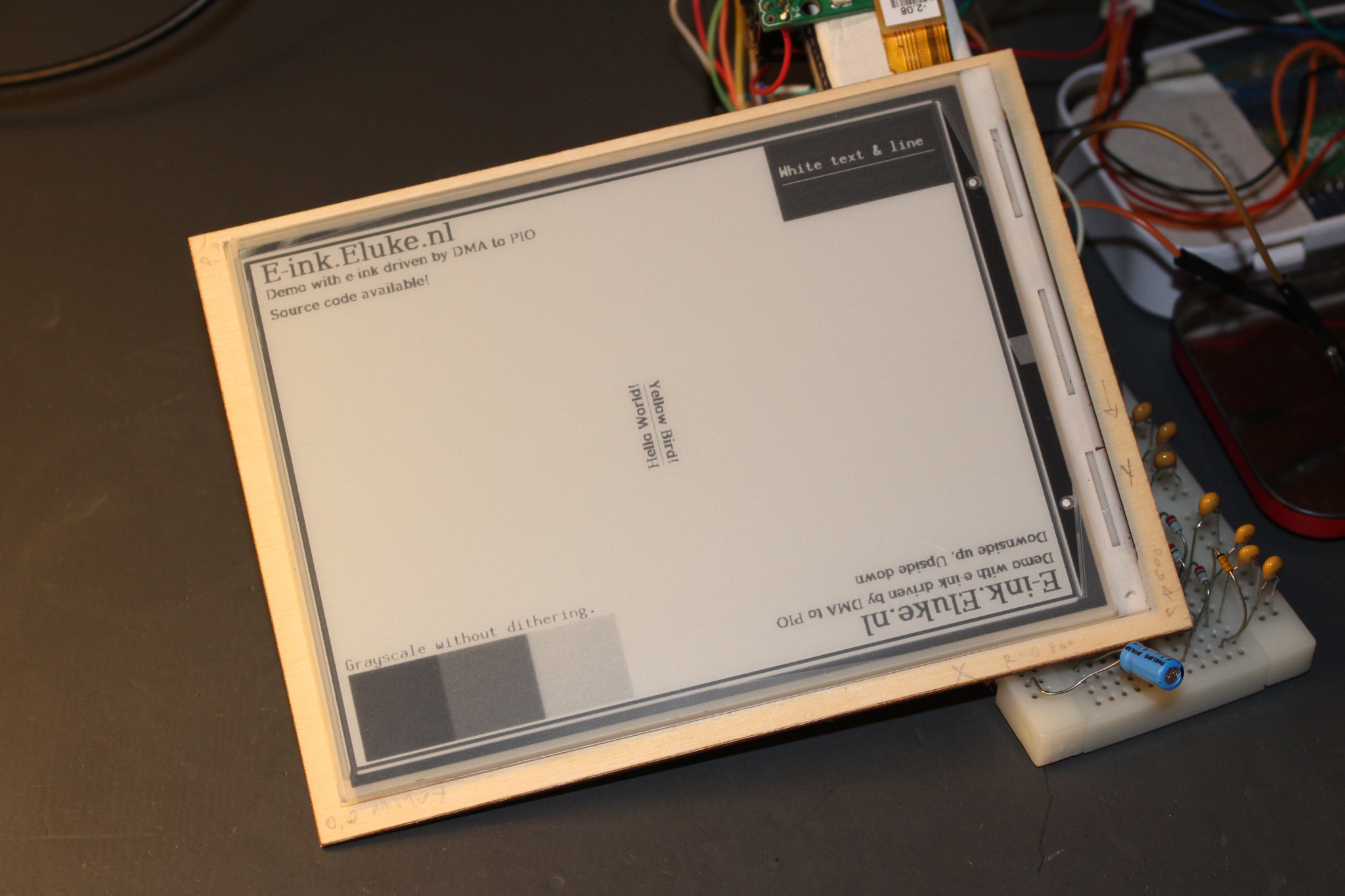
E‑ink aansturen met PIO & DMA
Eerder speelde ik met een e-ink scherm en kwam ik RAM tekort om het volledig aan te sturen. Maar zoiets als een RP2040 heeft RAM zat. Ook zou ik met de PIO het scherm aan kunnen sturen, zodat de processor ondertussen wat anders kan doen dan data door draadjes duwen. Dan zet ik de data…
-

E27 kruik
Het schroefdraad van de dop van een warmwaterkruik líjkt niet alleen erg op E27, er past zelfs daadwerkelijk een lamp in!
-
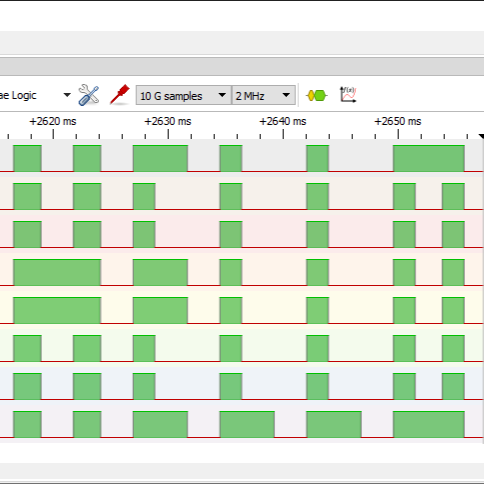
PIO patroongenerator principe
Wat is het tegenovergesteld van een logic analyser? Of eigenlijk “complementair aanvullend”, zoals een PNP en NPN transistor of een functie-generator en een oscilloscoop? Het blijkt een pattern generator te heten. Een soort digitale AWG dus. Zulk een ding is handig om een-of-ander digitaal signaal te genereren, bijvoorbeeld om te testen hoe een (deel)systeem daar…
-
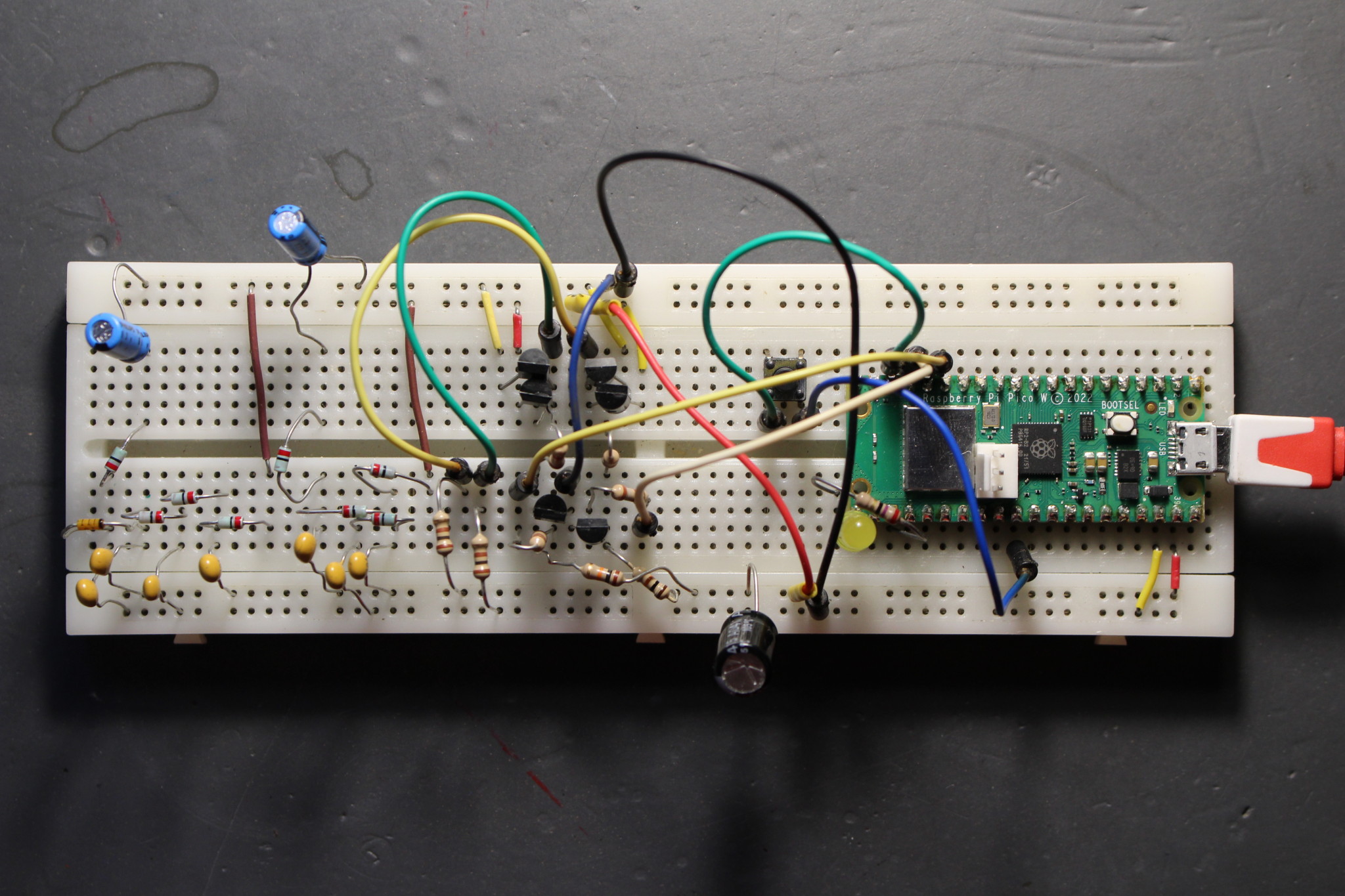
Pi Pico Pio Spielerij
Als eerste spielerij met de PIO van de Raspberry Pi Pico leek het me wel wat om de golfvorm voor een “Dickson Charge Pump” te maken. Een ladingspomp dus. Zoals het gelinkte artikel uitlegt gebruikt die 2 in fase verschoven blokgolven met een stukje dode tijd ertussen, samengevat in de hieronder overgenomen afbeelding: Op een…
-
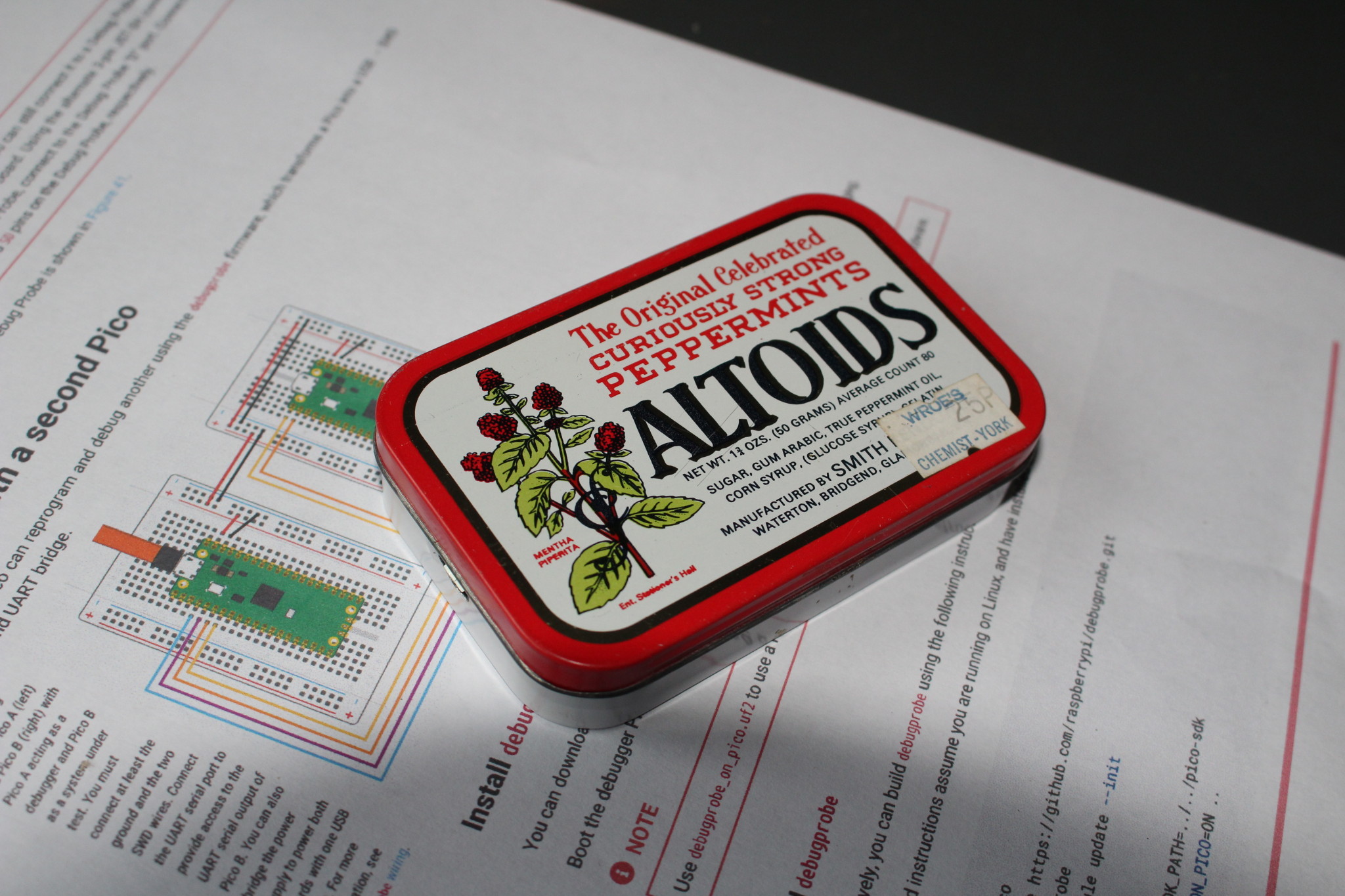
Pico Debugprobe in Altoids-blikje
Omdat ik meer met de Raspberry Pi Pico wil gaan doen, is het wel handig om een debugprobe te hebben. Dat kan met een 2e Raspberry Pi Pico. Ik vond het wel passend die in te bouwen in een Altoids blikje. Het prijsstickertje heb ik er bewust op laten zitten, het blikje is ouder dan…