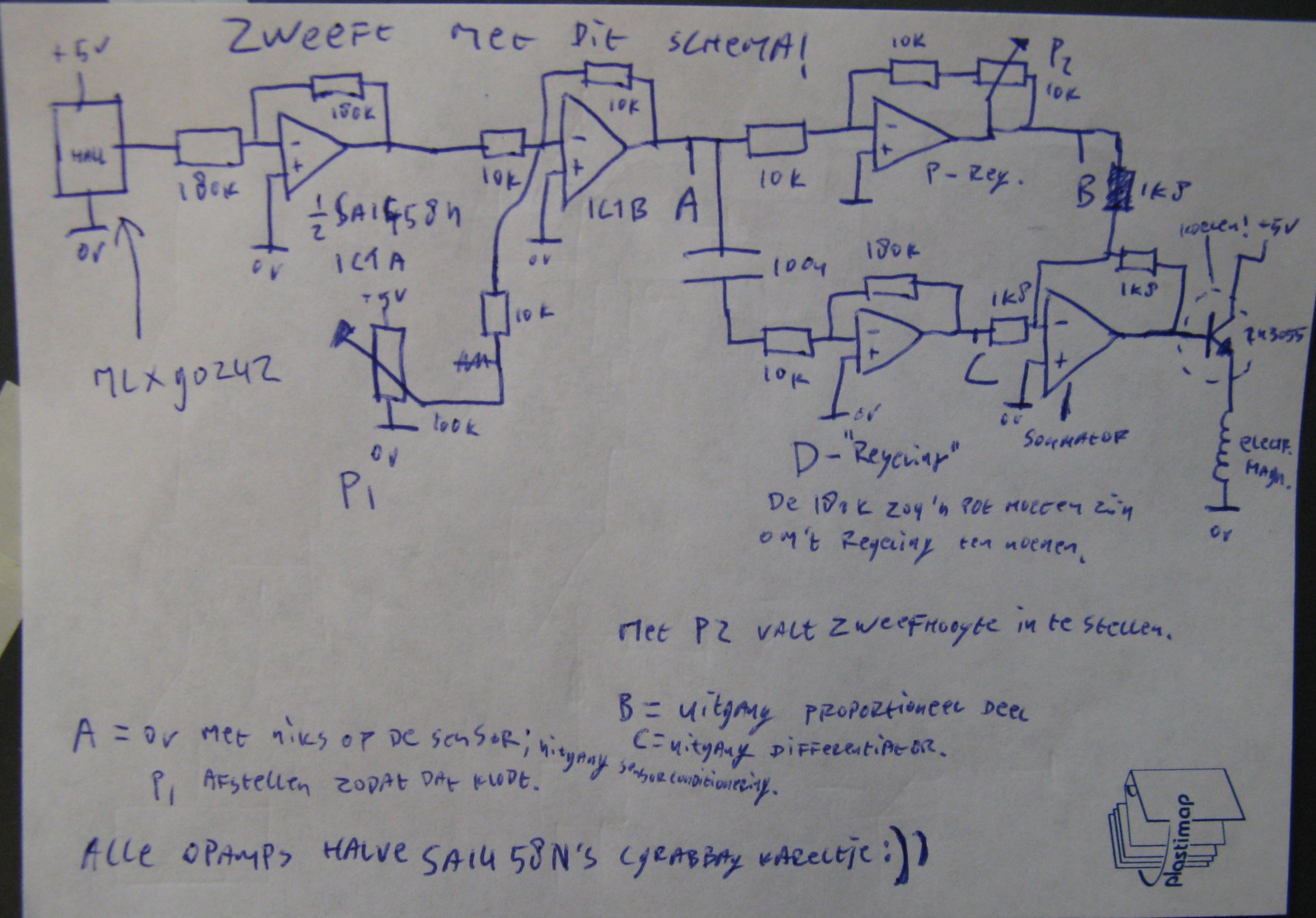
Wie mijn oude site kent, herinnert zich misschien nog wel de zweefmagneet. Daarbij zweeft een magneet onder een elektromagneet. Daarbij wordt een sensor en een regeling gebruikt om ervoor te zorgen dat de magneet blijft zweven. Die regeling kan met een microcontroller, zoals het elektuur-artikel waar ik me destijds (in 2008 !) op baseerde. Het kan ook met opamps, wat ik in december 2011 deed.
Maar onlangs (in 2022) ging het weer kriebelen. De op-amp schakeling uit 2011 gebruikt een emittervolger om de spoel te sturen, en die transistor wordt uiteraard warm en zit dus op een koelblokje. Met PWM kan het met een FET die niet gekoeld hoeft te worden en kan e.e.a. compacter. En wellicht kan het met minder opamps. En mocht iemand het na willen bouwen, is het wel fijn als diegene niet speciaal naar SA1458 op zoek gaat. Het moet in feite met elke opamp kunnen werken, een SA1458 is gewoon een 741, maar dan per 2 verpakt. Een LM324 leek me een leuk, gangbaar, goedkoop alternatief.
Zodoende heb ik eens zitten spelen, en het kan inderdaad met 1 LM324 (4 opamps). Voor wie niet van lezen houdt: filmpje en foto’s van het resultaat staan onderaan. Scroll scroll scroll…
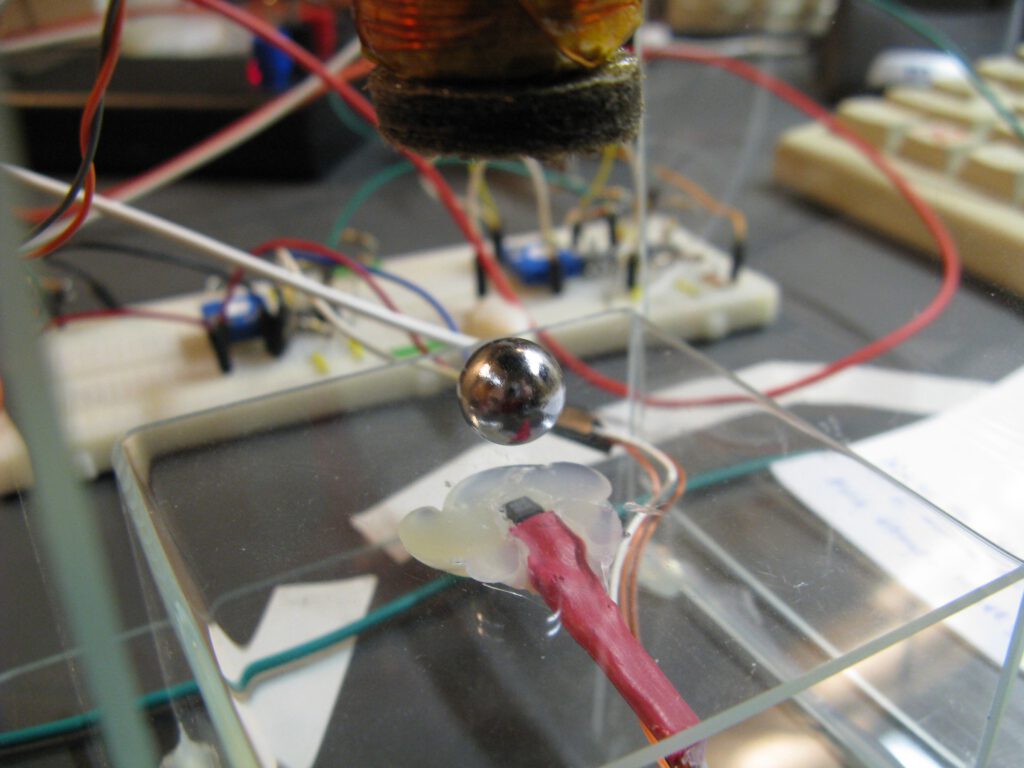
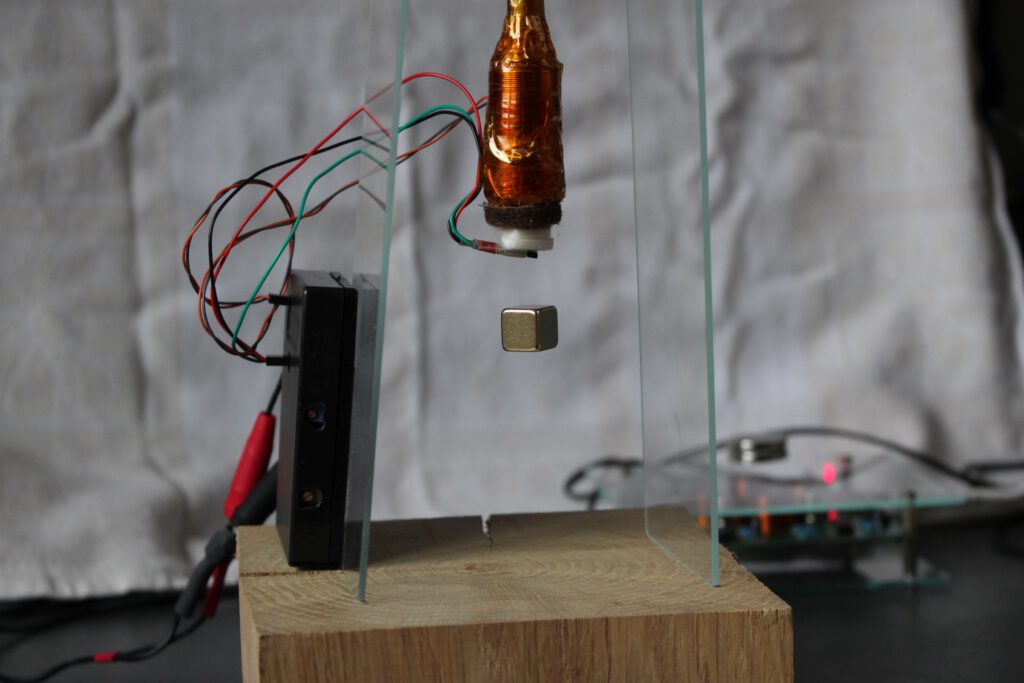
Ik vind het beter ogen als er niets onder de magneet is, en de magneet dus ’boven een gapende diepte zweeft’. In 2011 zweefde de magneet boven de (hall)sensor. Om de magneet boven een ‘diepte’ te laten zweven, moet deze sensor verplaatst worden van onder de magneet naar boven de magneet (dus tussen magneet en elektromagneet).
In onderstaand schema ga ik er dus van uit dat de sensor boven de magneet zit. De sensor onder de magneet, zoals bij de zweefmagneet uit 2008/2011, kan ook: dan moeten de aansluitingen van de comparator verwisseld worden en de regeling (P en D-factor) iets anders ingesteld.
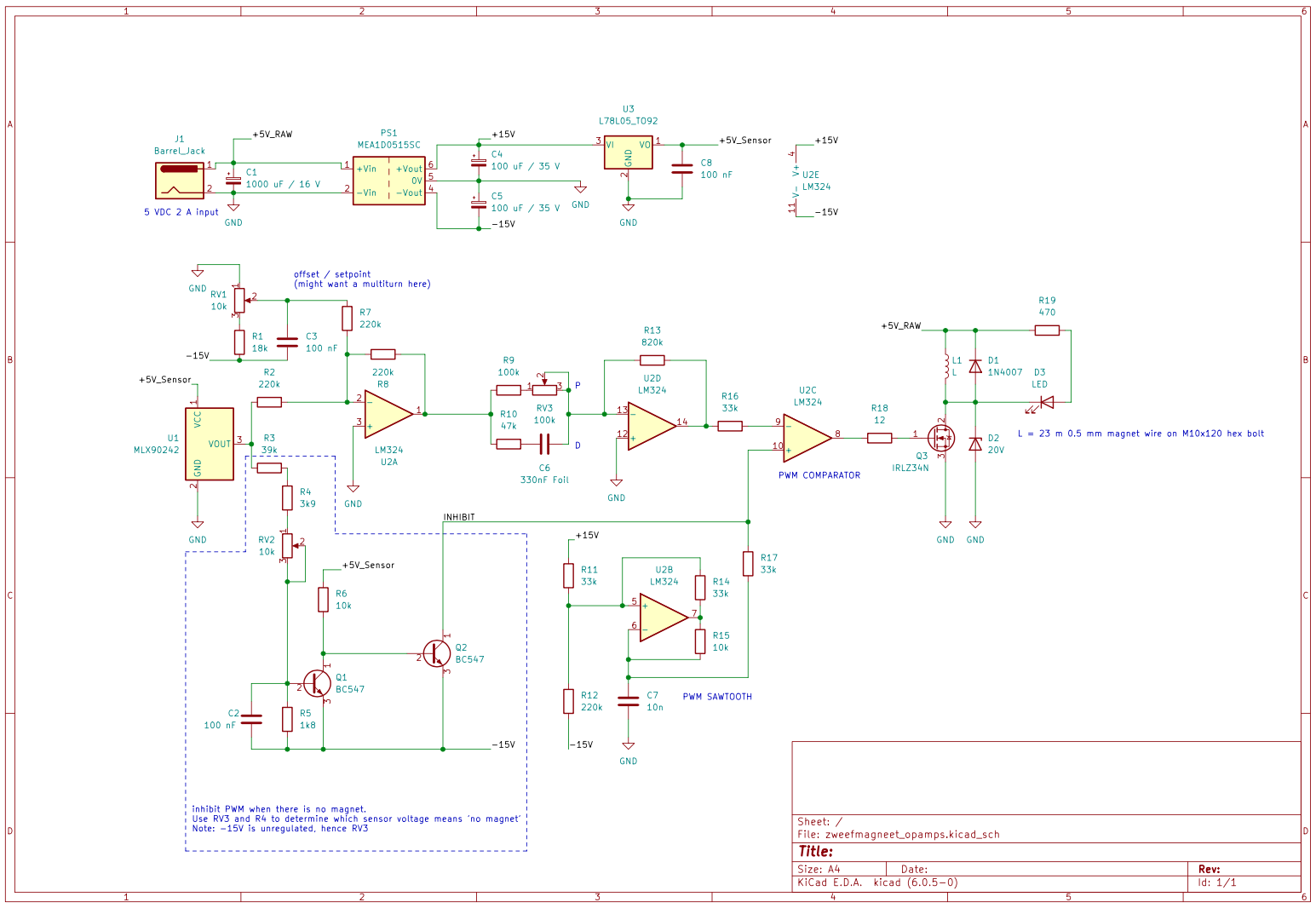
Dit schema kan via deze link als pdf worden gedownload. Een vereenvoudide versie kan in de online simulator van falstad interactief worden bekeken via deze link.
U2B en U2C, bij de simulatie de bovenste 2 opamps, vormen de PWM-uitgang. De linker (U2B) maakt een zaagtand (in de praktijk meer een soort haaienvin bij deze eenvoudige schakeling), de rechter (U2C) wordt als comparator gebruikt die vergelijkt tussen de zaagtand en een ingangsspanning. Zo wordt een PWM signaal gemaakt waarvan de pulsbreedte afhankelijk is van de ingangsspanning.
Door bij de comparator U2C de zaagtand op de + ingang aan te bieden en het ingangssignaal op de – ingang, zal de pulsbreedte op de uitgang afnemen bij toenemende ingangsspanning. Dus als de magneet dichter bij de sensor komt (en daarmee een hogere ingangsspanning veroorzaakt), wordt de elektromagneet minder sterk aangestuurd. Dit is hoe de comparator moet zijn aangesloten om te werken met de sensor boven de magneet: hoe dichterbij de magneet, hoe minder sterk deze door de elektromagneet moet worden opgetild.
Door de zaagtand op de – ingang aan te bieden en het ingangssignaal op de + ingang zal de pulsbreedte toenemen bij toenemende ingangsspanning. Dus als de magneet dichter bij de sensor komt (en daarmee een hogere ingangsspanning veroorzaakt), wordt de elektromagneet sterker aangestuurd. Dit is hoe de comparator moet zijn aangesloten om te werken met de sensor onder de magneet: hoe dichterbij de magneet, hoe sterker deze door de elektromagneet moet worden opgetild.
(Sensor en oriëntatie van de magneet zijn bij mijn zweefmagneet zo gekozen dat de spanning toeneemt bij naderende magneet. Bij een sensor die een dalende spanning uitgeeft bij naderende magneetpool, werkt het uiteraard weer net andersom.)
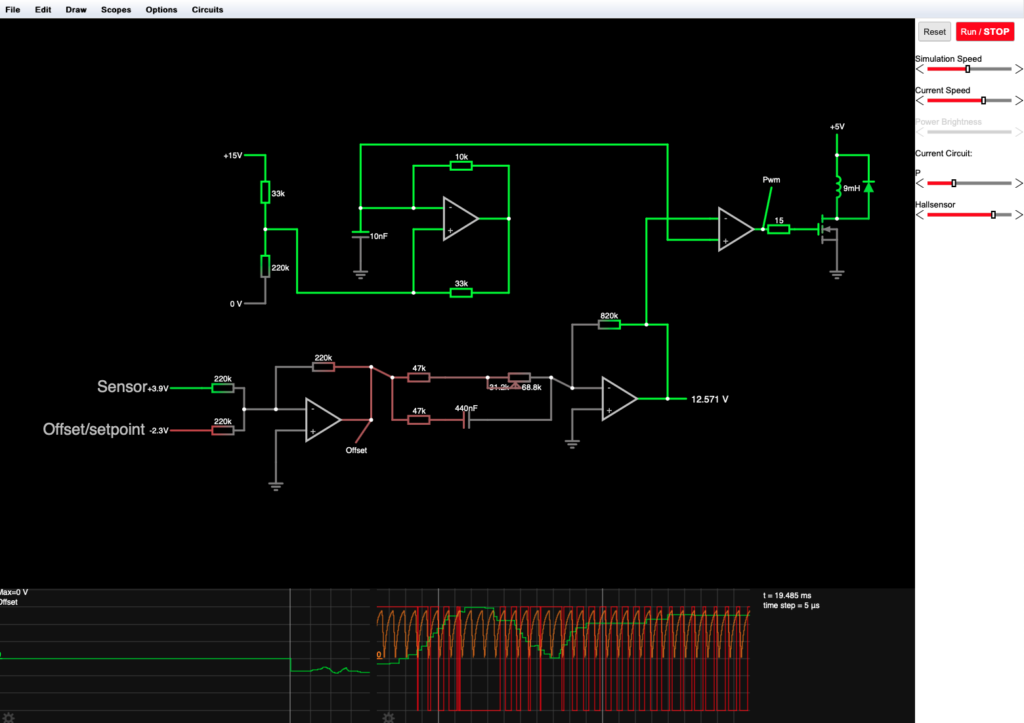
Die ingangsspanning van de comparator komt niet rechtstreeks uit de sensor, maar wordt gemaakt door de regeling. Daarvoor worden de 2 overgebleven opamps gebruikt. De eerste opamp (U2A) wordt gebruikt het setpoint in te stellen: De hallsensor geeft zonder magneet ongeveer zijn halve voedingsspanning aan de uitgang, en afhankelijk van welke pool van de magneet nadert wordt deze spanning hoger of lager. Zoals de polen gekozen zijn wordt de uitgangsspanning van de hallsensor hoger als de magneet nadert. Het setpoint wordt dus (met een potmeter als spanningsdeler) ingesteld op ongeveer 3,9V. Deze eerste opamp (linksonder in de simulator / U2A in kicad-schema) wordt als een inverterende somator gebruikt. De volgende opamp (rechtsonder in simulator / U2D in kicad) inverteert nogmaals, waardoor het uiteindelijke uitgangssignaal weer positief is.
Deze opamp (U2D) doet de uiteindelijke regeling: Het is een inverterende versterker, maar tevens sommator en differentiator: Via 2 paden wordt signaal aangeboden: een weerstand voor het proportionele (P) deel van de regeling, en een condensator voor het differentiële (D) deel van de PD regeling. Deze kunnen dus worden ingesteld door met de componentwaarden van deze weerstanden en condensators te spelen. Wie dit wil nabouwen zal veel met de componentwaarden moeten spelen van van R10 en C6 (om de D-factor in te stellen) en R9/RV3 (om de P factor in te stellen). Deze zijn afhankelijk van de eigenschappen van de elektromagneet en de magneet en de sensor, en je hebt waarschijnlijk niet exact dezelfde.
In het oude schema met de sa1458 zijn de somator, versterker (P) en Differentiator (D) nog 3 afzonderlijke opamps. Door dit samen te voegen is het wel wat lastiger af te stellen: er is ondelinge beïnvloeding. De weerstand tussen uitgang en ingang heeft invloed op zowel P- als D-factor van de regeling, en de weerstand die de P-regeling bepaald staat parallel aan het RC-netwerk van de D-regeling en heeft daar dus invloed op. Vandaar: even spelen in de simulator en op breadboard.
{kind=link}
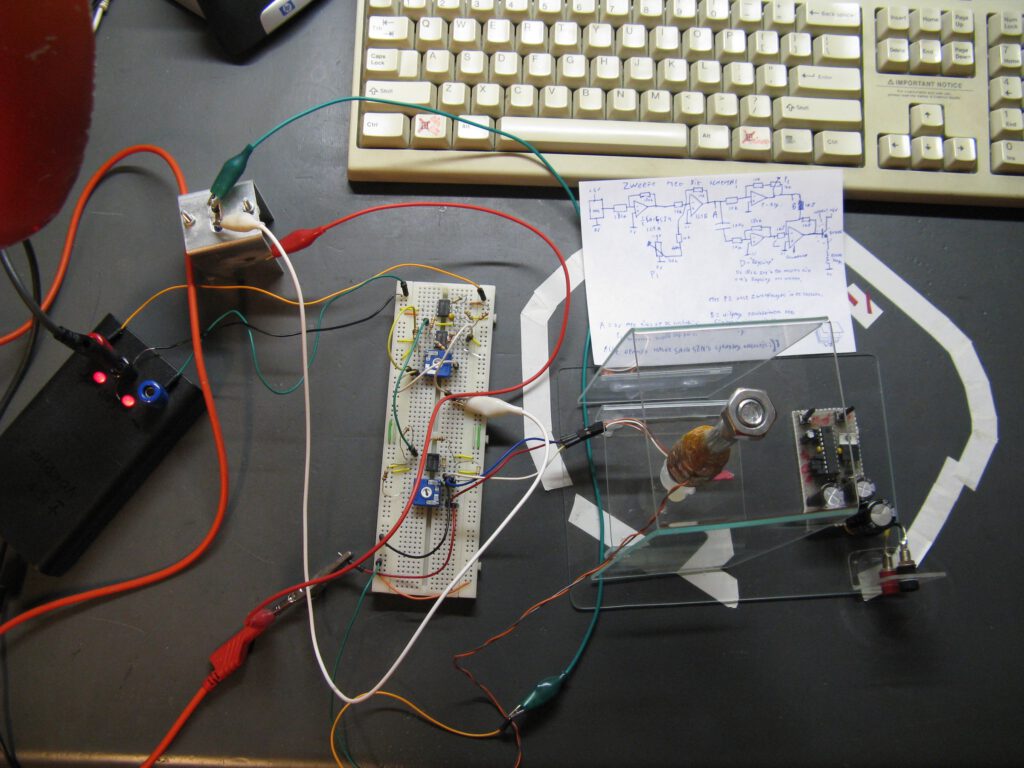
Let er bij nabouwen op, dat de stroom door de elektromagneet-spoel de voeding niet onderuit trekt. Het beste is de sensor een eigen, “schone”, voeding te geven. De spoel die ik gebruik doet het toevallig goed op 5 V, dus ik voedt de zweefmagneet met 5 V. De sensor werkt ook op 5 V. De opamps krijgen +/- 15 V. Bij de test op breadboard komen deze spanning uit 3 afzonderlijke labvoedingen. Op het uiteindelijke printje wordt de 5 V voor de sensor gemaakt uit de +15 V met een 78l05, zodat de sensor een eigen “schone” voeding heeft. De +/- 15 V voor de opamps wordt gemaakt uit de +5 V ingang door een kant-en-klaar convertorblokje (PS1, een MEA1D0515SC).
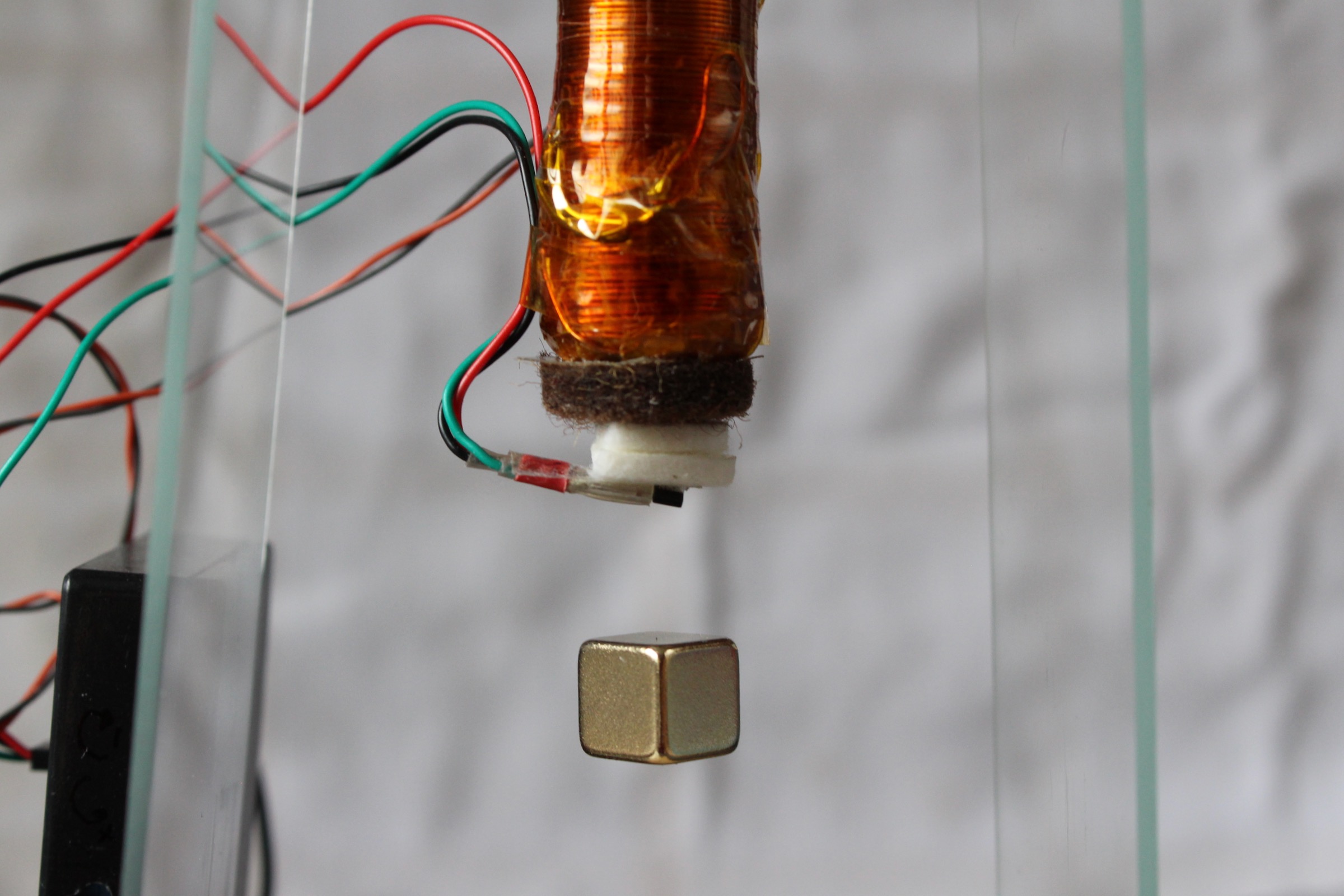
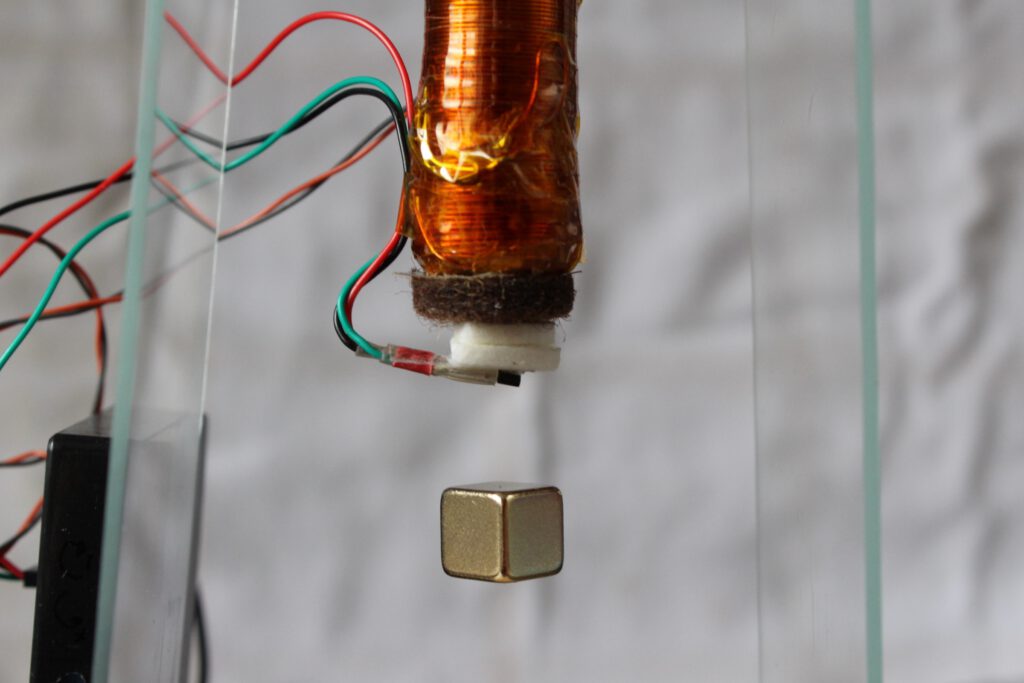
De sensor wordt boven de magneet, met een tussenruimte onder de spoel geplaatst. De tussenruimte tussen sensor en spoel is nodig omdat het veld van de spoel ook door de magneet gezien wordt. Ik gebruik er een paar stoelviltjes voor.
De elektronica zit als volgt op een printje en in een kastje:
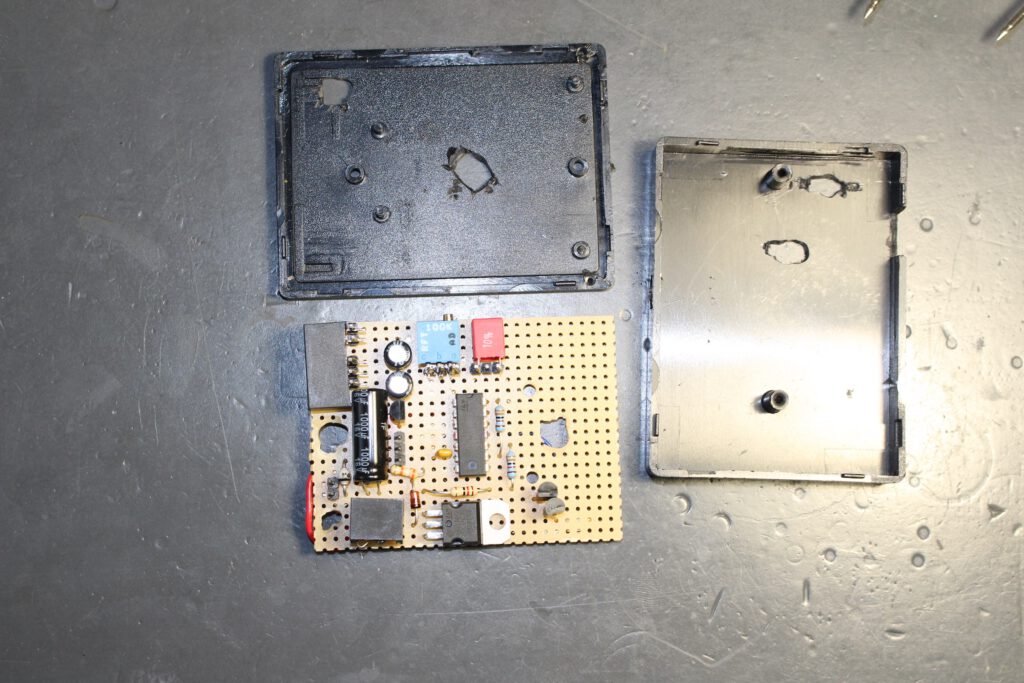
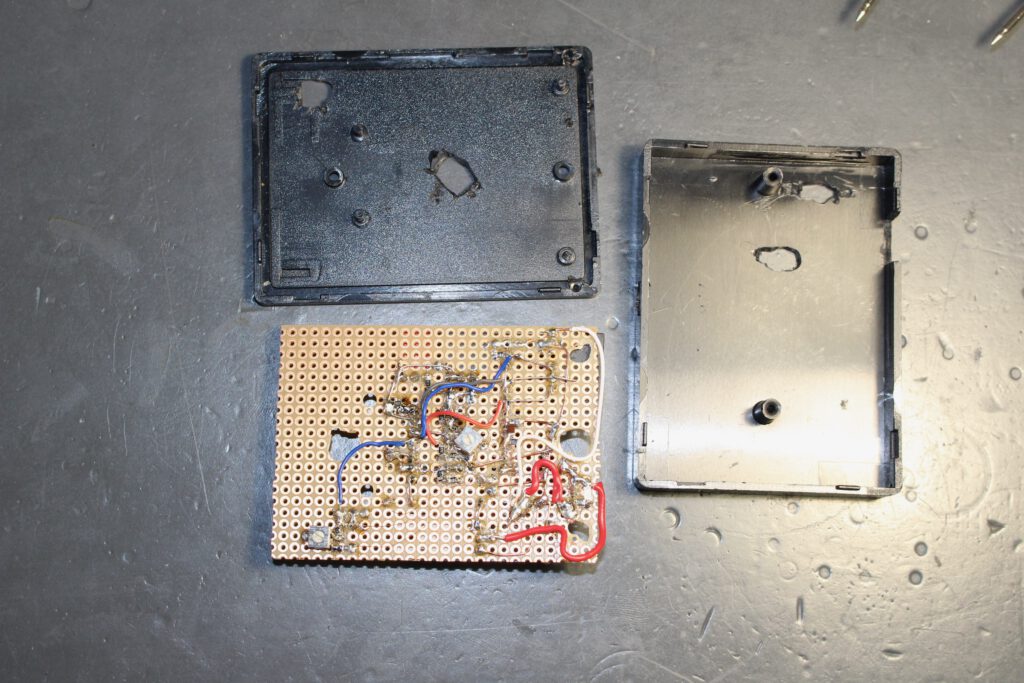
(waarbij later, niet op de foto, ook de Offset-Potmeter is vervangen door een multiturn trimmer. Dat werkt toch prettiger)
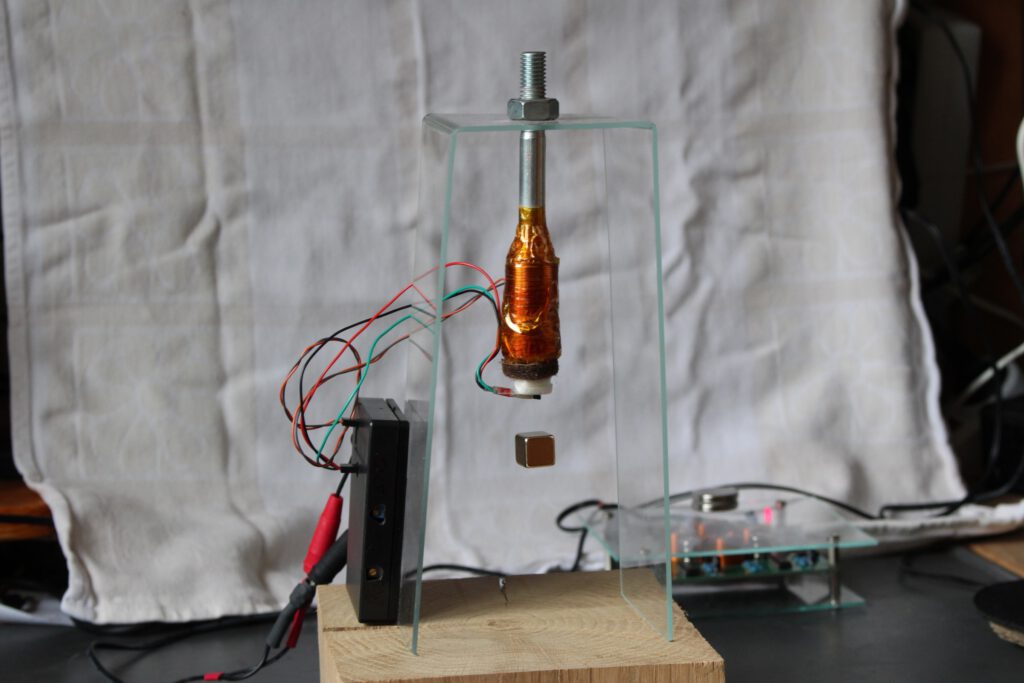
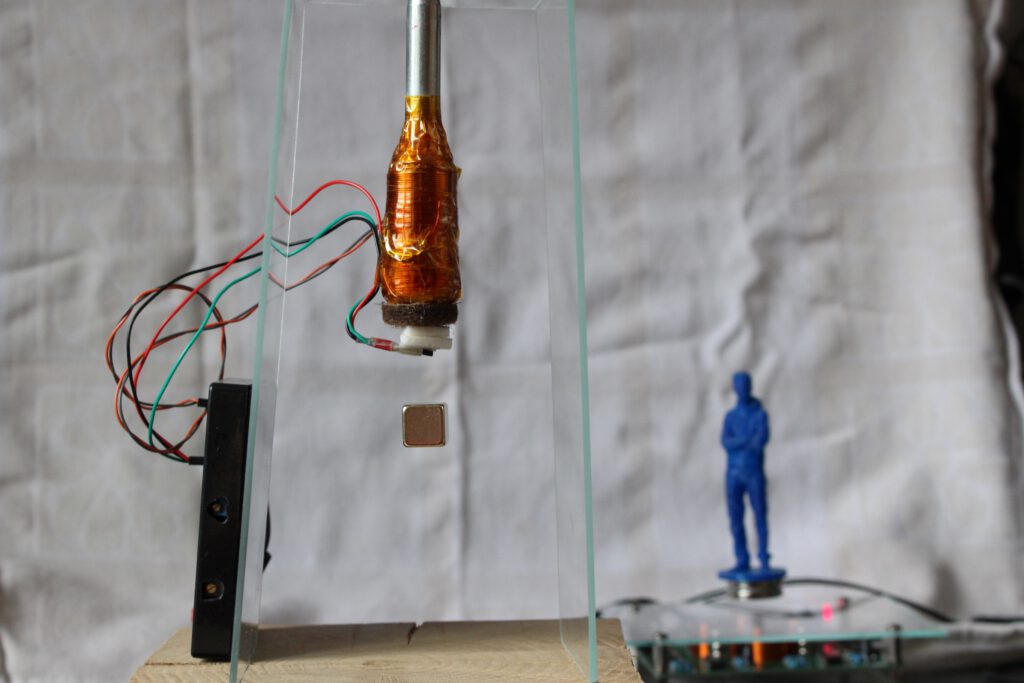
Met als resultaat een zwevende magneet:
Leave a Reply