-
Welkom op mijn blog
Ik ben Lucas, en ik schrijf vooral over mijn elektronica (hobby) projecten, maar ook over andere dingen die ik maak, doe, of vind, of waar ik over wil schrijven. Voorbeelden van wat ik een leuk elektronica-project vind: het neonlampjes-horloge, de differentiële probe, de rgb jongleerballen en de zweefmagneet. Voorbeelden van interessante reparaties: Het vinden van…
-

TPU filament als aandrijfriempje?
Naar aanleiding van dit filmpje van een sokkenbreinmachine, eens geprobeerd of flexibel TPU 3d-printer filament zich ook op deze manier aan elkaar laat zetten. Dat lukt inderdaad prima en is eigenlijk heel makkelijk. Met mijn heteluchtsoldeerstation heb ik de eindjes verwarmd, om ze vervolgens tegen elkaar te duwen en af te laten koelen. De eindjes…
-
Treinbaanblokken gnireenigne
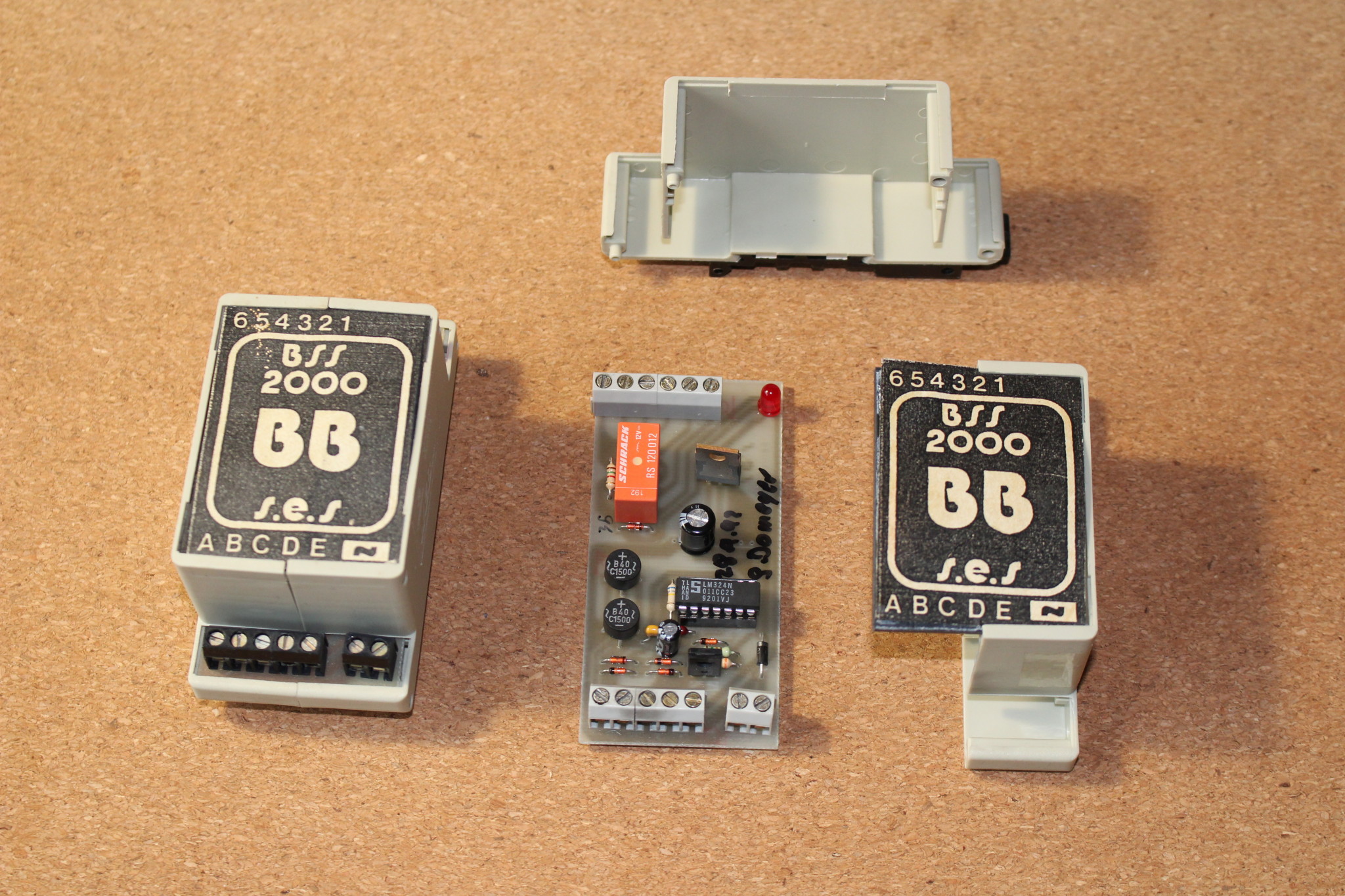
Een oude middelbareschoolvriend van mij heeft een vader, de vader heeft een modelspoorbaan, en de modelspoorbaan is uitgerust met oa. een blokbeveiligingssysteem. Bij dat systeem moet een trein moet wachten tot de trein in het volgende blok doorgereden is, zodat er meerdere treinen op 1 baan kunnen rijden. Niks van dat modernerwetse digitale gedoe, maar…
-
Kookwekker
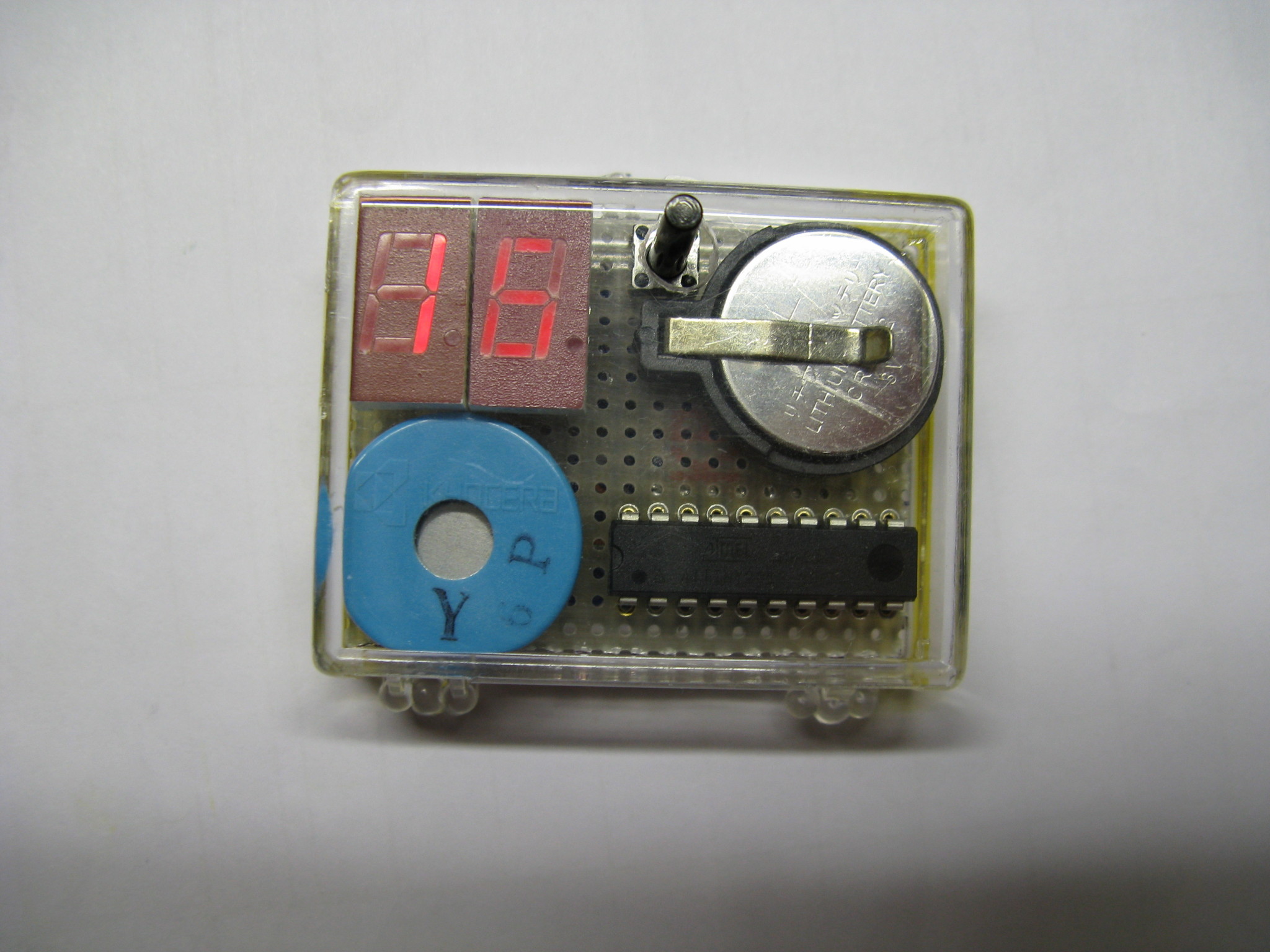
Een nieuwe behuizing voor een oud projectje. In oktober 2011 maakte ik deze kookwekker. Ik denk dat dit mijn eerste project was waarbij een microcontroller zo zuinig mogelijk in slaapstand moest staan, omdat het op batterijen werkt. Dat is gelukt: 1uA in slaapstand. Het display geeft de ingestelde tijd alleen aan tijdens het instellen en…
-
Needle & thread keypad repair
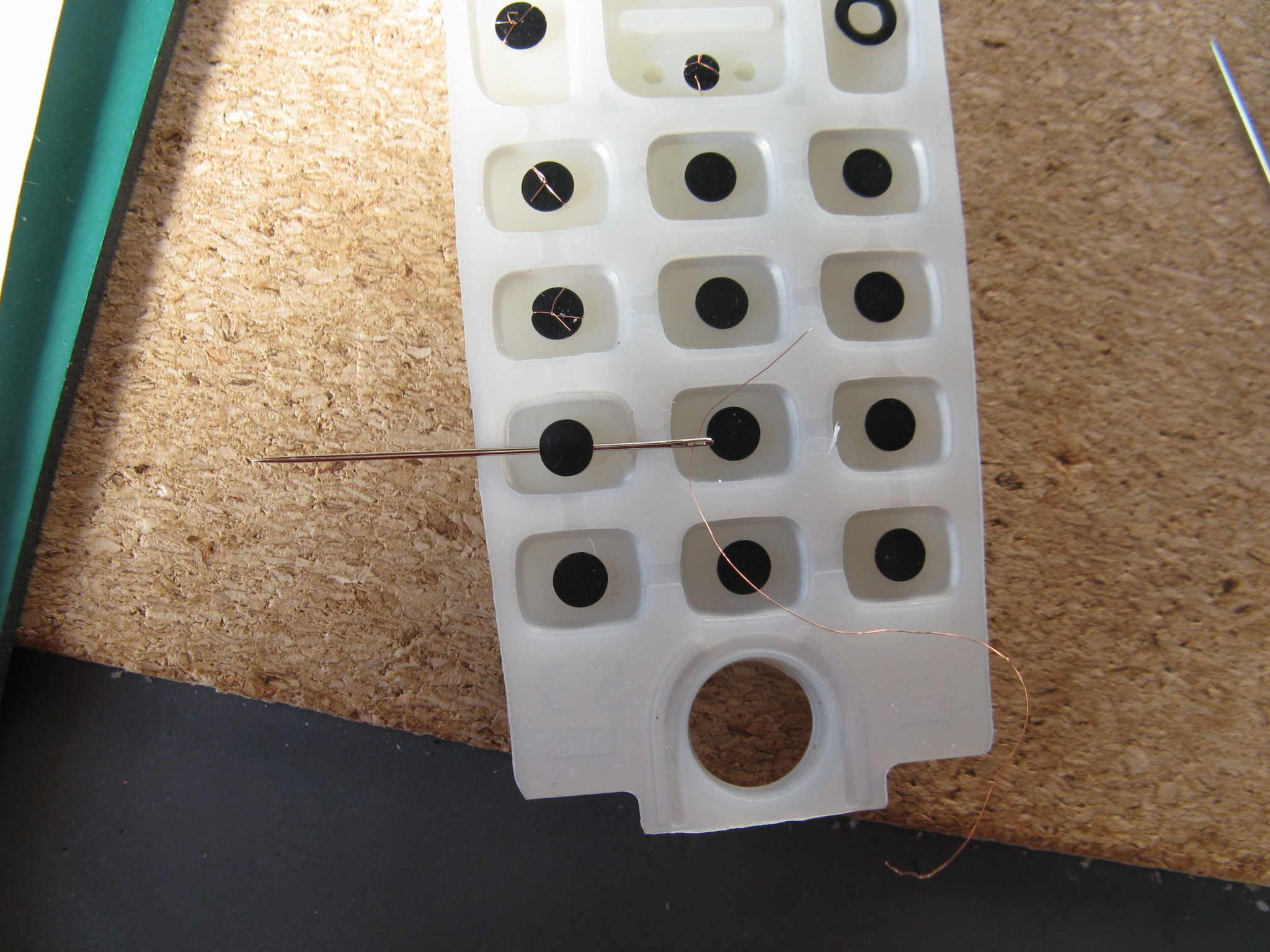
One of the dect phones stopped responding to keypresses, even when pressing really hard. This is a know problem with rubber keypads, it also occurs in remote controls etc. A keypad swapped from another phone worked fine, so it was the ‘rubber mat’ and not the board. I tried repairing the rubber mat by “painting”…
-

Draadloos toetsenbord teardown
Helaas een permanente teardown: de doorgesneden foliekabel laat zich niet herstellen. De oorspronkelijke klacht was dat de backspace-toets niet werkte en er leek koffie of cola of iets dergelijks onder specifiek die toets te zitten. Schoonmaken zonder uit elkaar halen leidde tot water tussen de folie-lagen. Ongeduld bij het laten drogen daarvan leidde tot verdere…
-
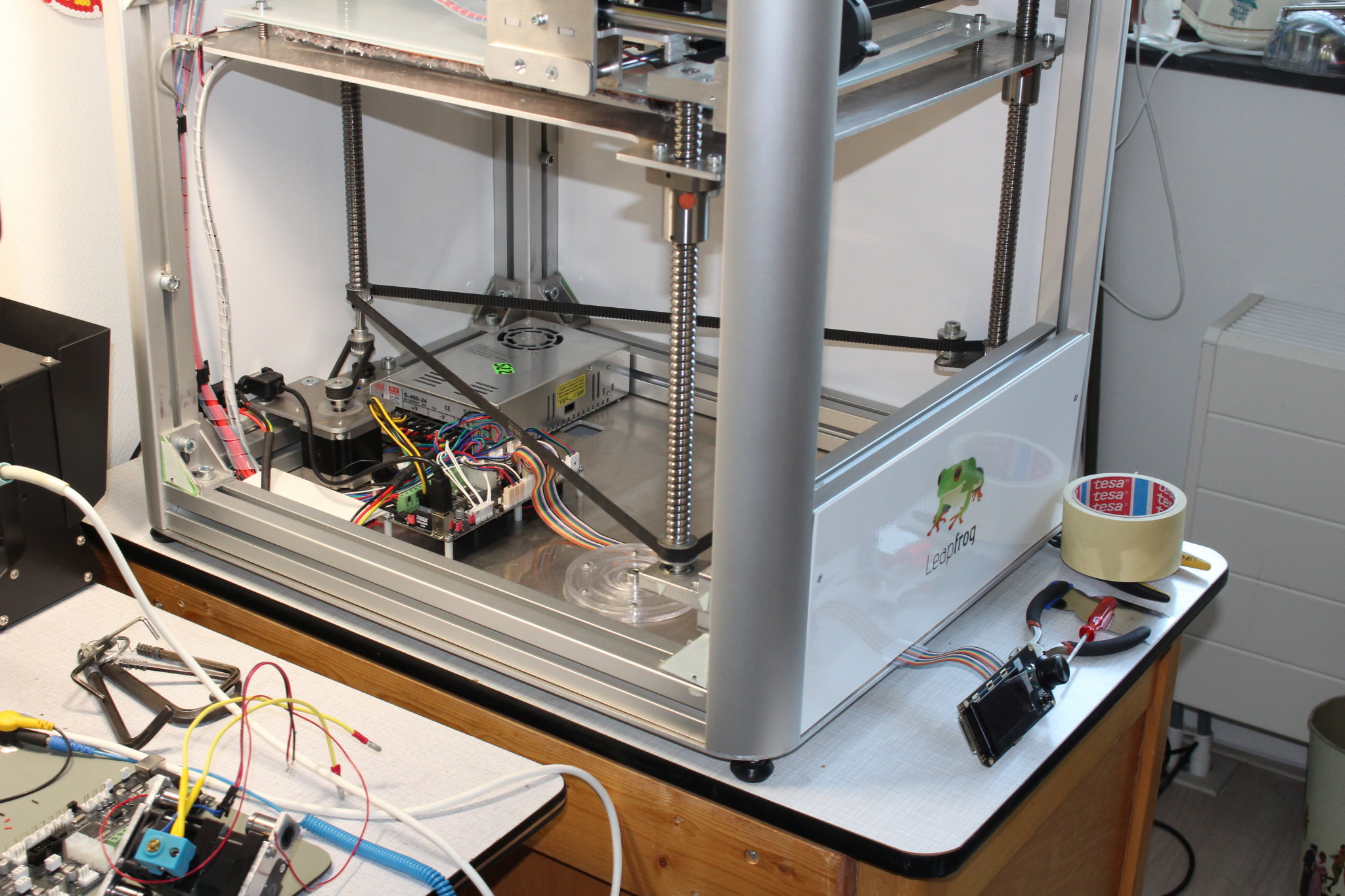
Klipper for Creatr Leapfrog
I’m experimenting with Klipper on my Leapfrog Creatr. One of the first things needed if you also want to do this, is a configuration file. This file describes which IO pin controls what, and contains settings. I made this file based on my printer and its Marlin configuration file. I did the configuration checks and…
-

Reflowven
Dit is zo’n projectje waar een deel van de lezers van mijn blog door hen gegeven of verkochte spullen in gaat herkennen 😉 Ik heb een reflow-oventje gebouwd op basis van een klein snackoventje dat ik kreeg van een vriend uit de MakerSpace. Deze blogpost is een soort bouwverslag (dus geen handleiding!). Ik heb de…
-
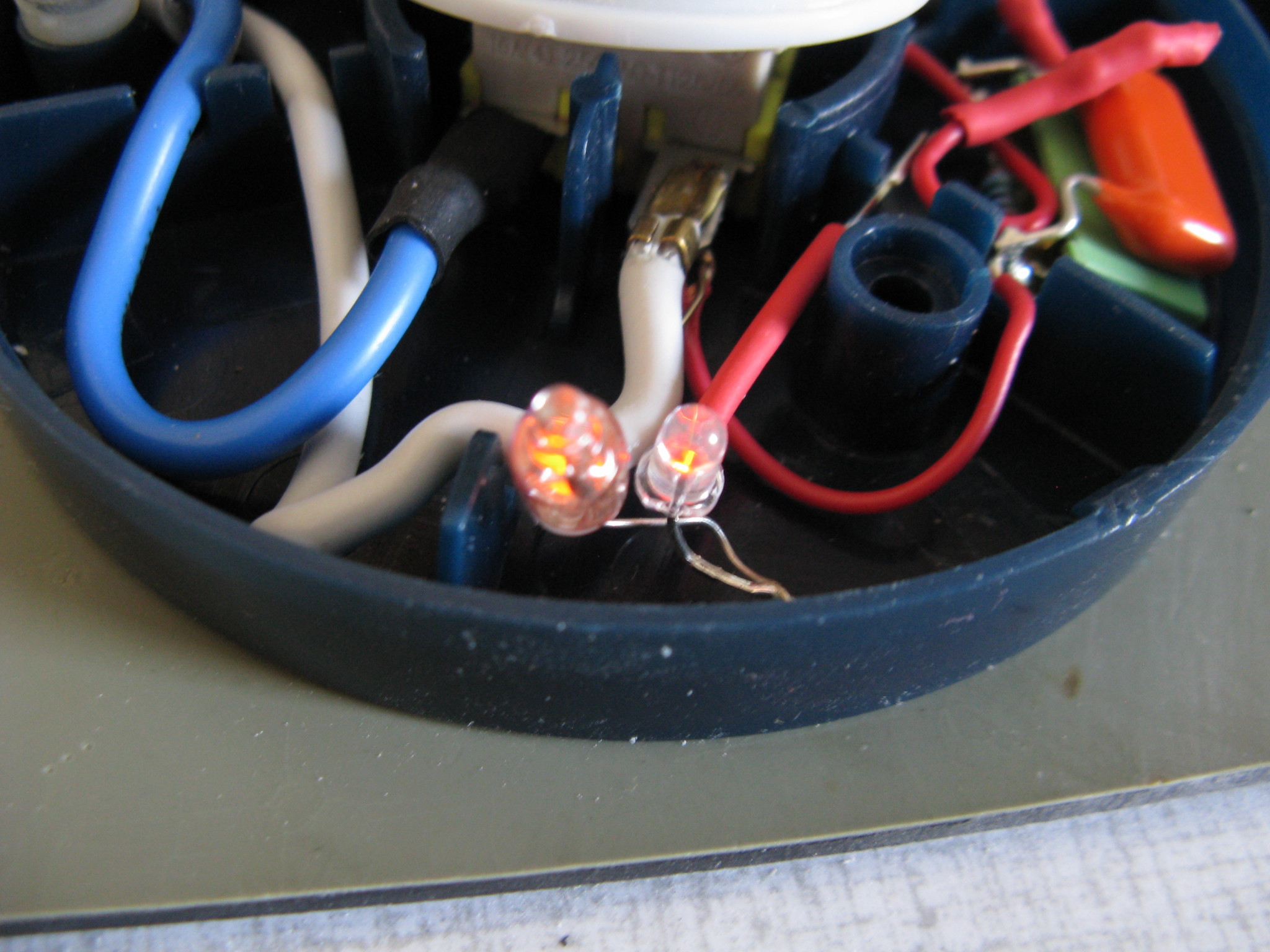
Knipperende schakelaar
Een neonlampje kan gebruikt worden om een oscillator te maken, zonder verdere (actieve) componenten. Een weerstand, condensator, en eventueel een diode is alles dat nodig is. De diode in geval de schakeling met wisselspanning gevoed wordt: De oscillator werkt alleen op gelijkspanning. Daardoor zal ook slechts 1 van de 2 elektroden van het neonlampje licht…
-
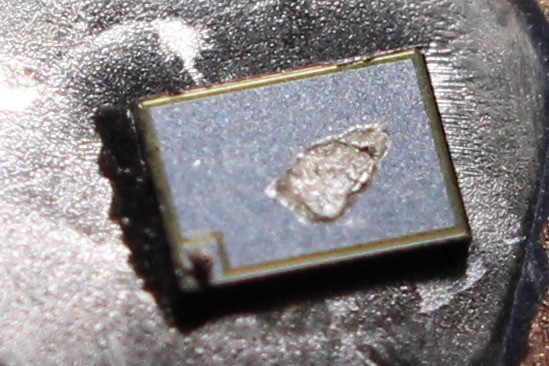
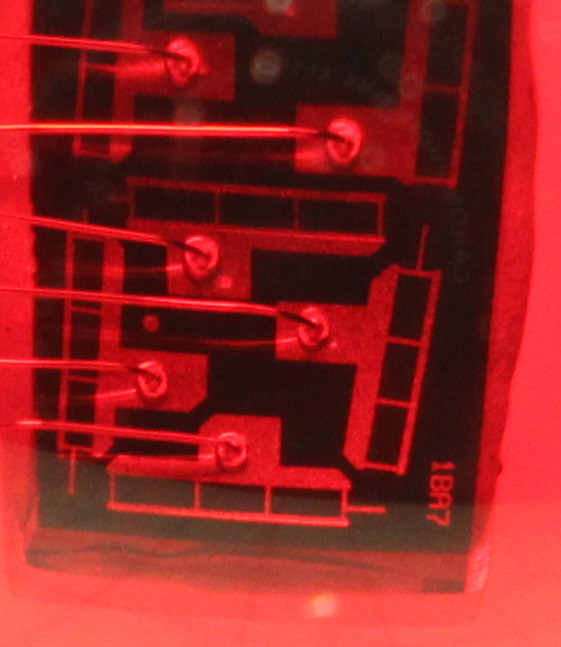
7812?
Van een vriend kreeg ik een tiental 7812 spanningsregelaars die niet werken. Hij had ze bij Aliexpres vandaan, en bedoelde ze voor een hobbyproject aan zijn treinbaan. “Niet werken” betekend in dit geval dat er geen uitgangsspanning uit komt. Tussen exemplaren verschilt het, maar er komt ongeveer 0.5 volt uit, en de meeste exemplaren worden…
-
Mooi led displaytje
Eerder schreef ik over een mooi litronix displayje, maar deze post gaat over de QDSP 6064 van Hewlet Packard. Dezelfde HP als van Mooie Meetapparatuur & Prijzige Printerinkt. Het is een bubble-display, zo genoemd vanwege de lens “bubbels” voor de cijfers. Waarschijnlijk is het van een recenter productiedatum dan het litronix display: onderop staat “9912”…
