-

RGB jongleerbal / jongleerkubus
In “Show Your Projects” op CircuitsOnline.net heb ik dit project al eerder getoond, maar het is ook wel een blogpost waard denk ik. Al is een blog natuurlijk eigenlijk bedoeld om te mekkeren over dingen als een gebroken arm wegens een onoplettende automobilist*, maar ook dàt had ik al op CO geuit. Blijft dus over…
-
Lol met Wireless Power Transfer
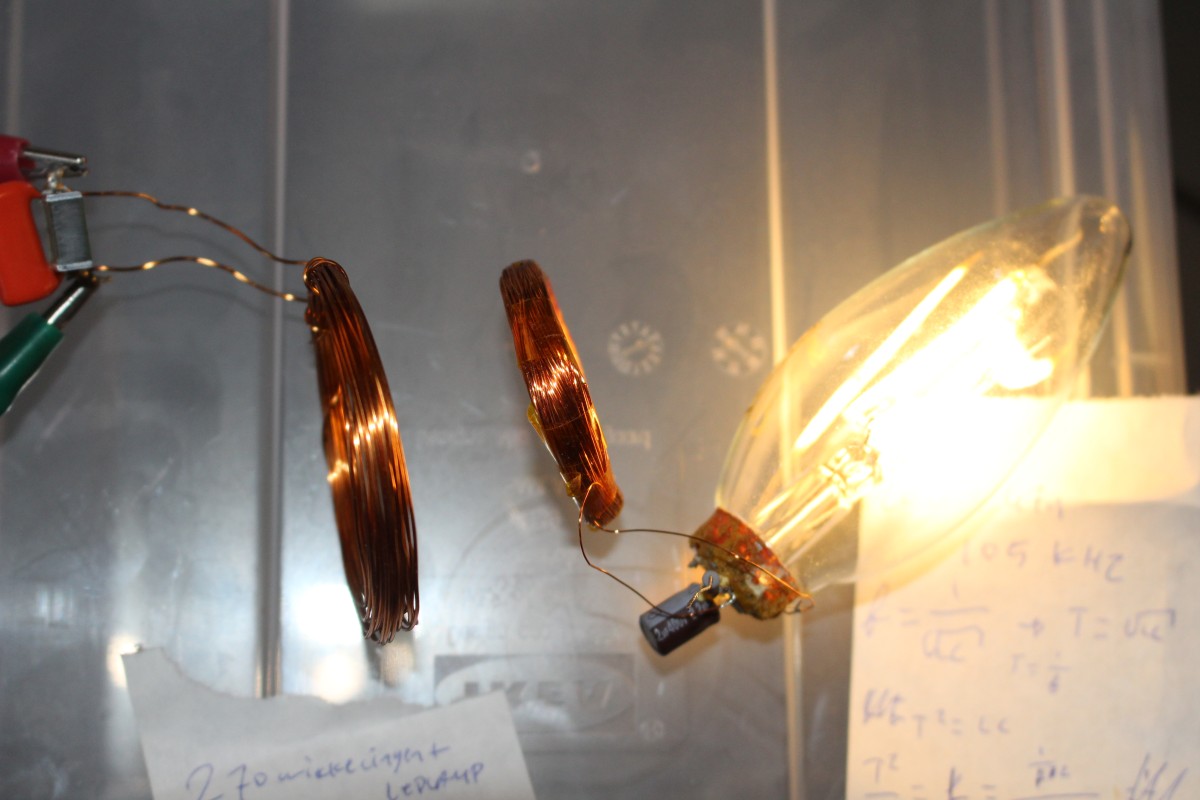
Het plannetje met de Sencys filament ledlamp die ik vorige blogpost uit elkaar heb gehaald, was om deze draadloos te laten oplichten. Er bestaan namelijk gadgets waarbij een zwevende ledlamp licht geeft. In theorie kan daar stiekem een batterijtje in verstopt zitten, maar dat is stukken minder leuk om na te maken. Een magneet laten…
-
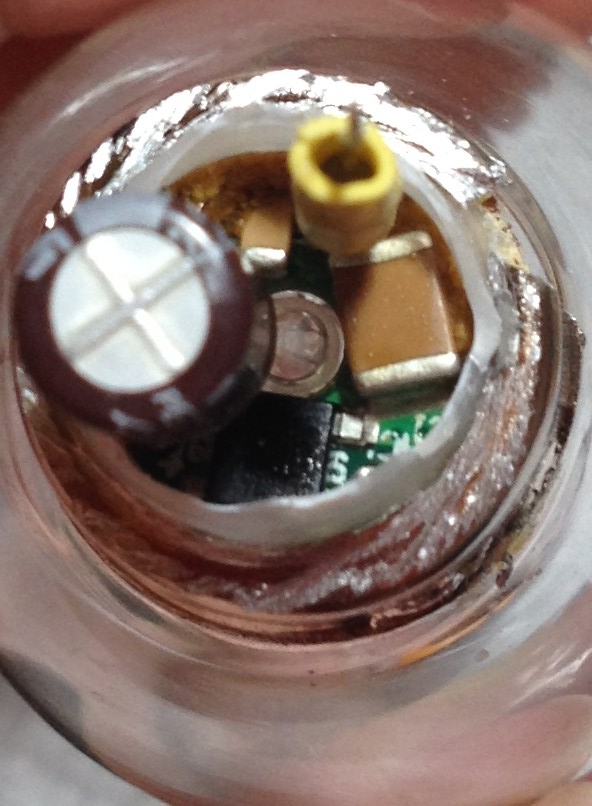
Sencys Ledlamp teardown
Dit is een ietwat stream-of-consiousness (Maar dan leesbaarder (hoop ik)) blogpost over een… Ledlamp! Enjoy! Ik ergerde me er aan dat mijn sencys™ filament kaarslamp knipperde. Vanaf dat ‘ie nieuw was zat er een 100Hz flikkering in het licht, wat te zien is als “stroboscopisch effect” bij alles wat beweegt in het licht van zo’n…
-

Sla-la
(Het is eigenlijk veldsla, maar ja, het groeit in een la, et cetera…) Ik werkte deze post af en toe bij met nieuwe foto’s. De meest recente status is 09-01-2019. Daarna heb ik de la-sla uit de sla-la geoogst. Toevallig op dezelfde dag veldsla in het groentepakket, de eerste van het jaar. Kleinere blaadjes, maar…
-

Circuitsonline Voeding
Ik had een pcb voor de circuitsonline voeding gekregen, dus heb ik de rest van de onderdelen gekocht en de voeding opgebouwd in een mooie behuizing. Het is meer metaalbewerking dan elektronica, maar dat is ook wel eens leuk voor de afwisseling, en ik vind het een erg mooi resultaat. De afwerking van een elektronica-project…
-
![[fixed] TM1637 LED display “not working”.](https://www.eluke.nl/wp-content/uploads/2018/03/lowres_tm1637_done.jpg)
[fixed] TM1637 LED display “not working”.
Last week I got 2 of these displays from a friend who couldn’t get them to display anything. (He knows I like those challenges.) Below picture proves it now works. What was the case: The data sheet says (e.g. in the schematic at page 8) a 100pF capacitor should be placed on CLK and DIO…
-
[gefikst] TM1637 LED display “doet niks”.
Afgelopen week kreeg ik 2 van deze displays van een vriend die ze niet aan de praat kreeg en weet dat ik van dergelijke uitdagingen houd. Op bovenstaande foto het bewijs dat het inmiddels gelukt is het displaytje wél aan de praat te krijgen. Wat was het geval: In de datasheet staat (o.a. in het…
-
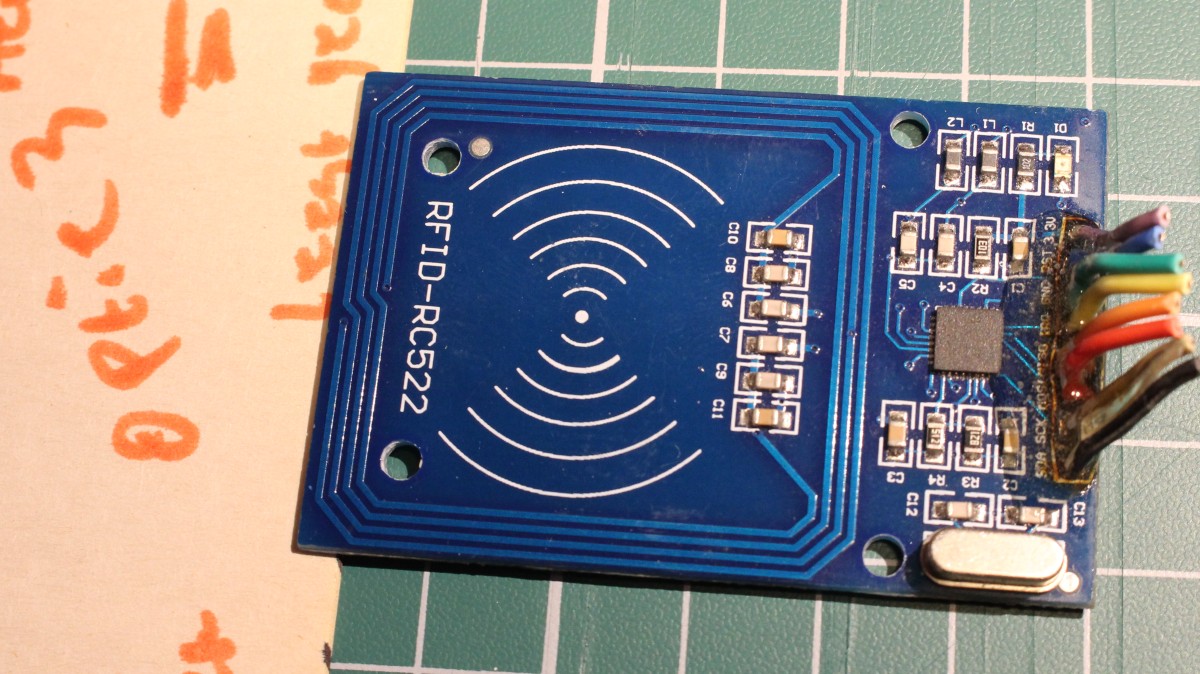
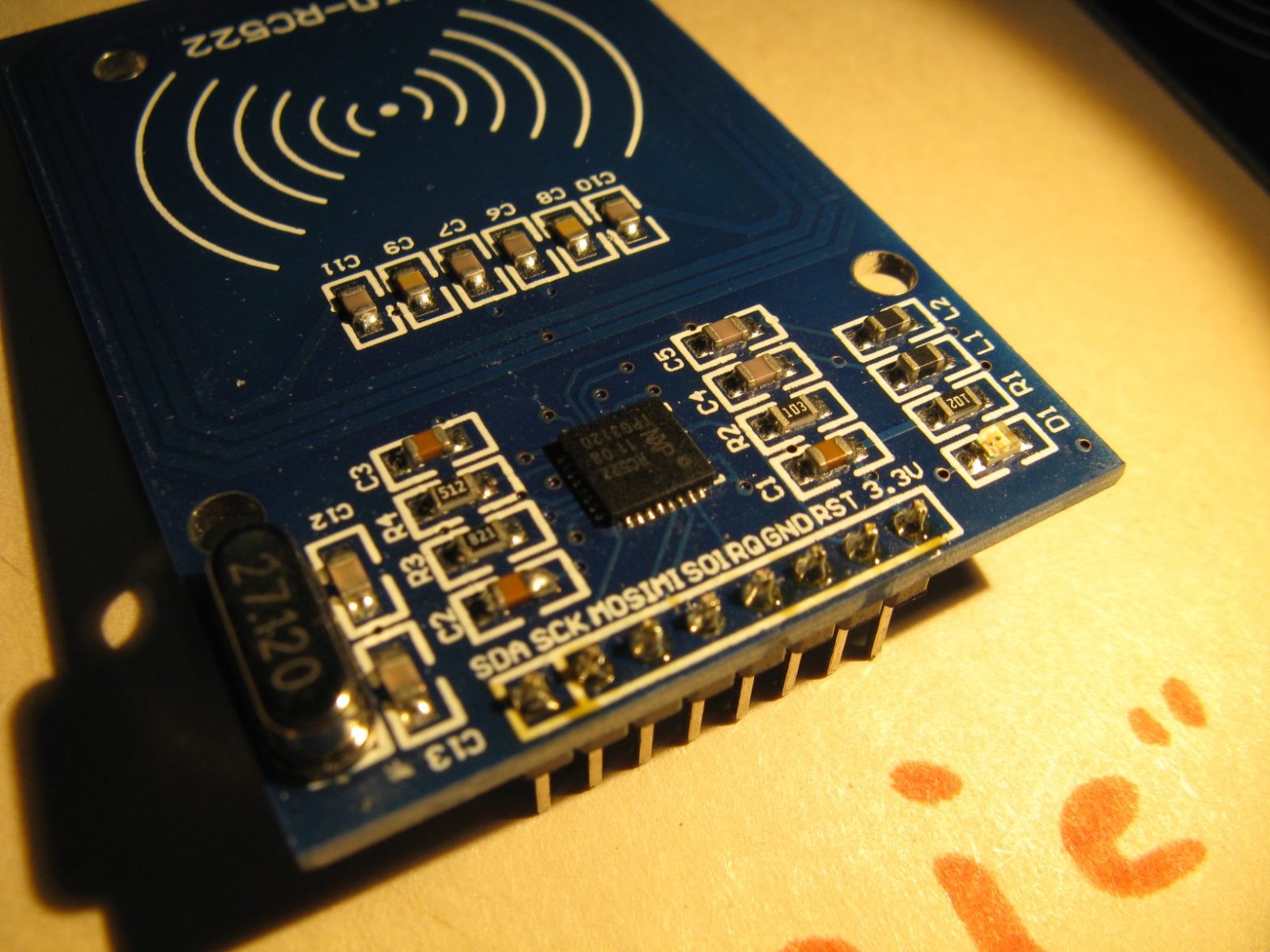
Fixed: RC522 RFID reader not reading (some) cards (Part 1)
Some of the RC-522 RFID card reader modules that can be bought on ebay / aliexpress have a problem: they do not read all (types of) cards they should be able to read. In this blog post I want to explain how to recognize these faulty readers and how to fix them. (There is a…
-
Opgelost: RC522 RFID lezer leest (sommige) kaarten niet. (Deel 1)
Ik heb recent een probleem ontdekt met de RC522 rfid kaartlezer modules die men op ebay / aliexpres en dergelijk kan kopen: ze lezen sommige kaarten niet. In deze blogpost wil ik uitleggen wat het probleem is, en hoe het opgelost kan worden, in de hoop dat mensen die hetzelfde probleem tegenkomen daar wat aan…
-
How to enable Motion Detection Interrupt on MPU6050.
The MPU6050 data sheet has a nice “marketing” section, claiming it has a DMP unit, and a couple of useful interrupts, among them a accelerometer event interrupt. However, how to actually use these features is not documented there. And I want to use the Motion Detection Interrupt (so I can put the host MCU to…
-
Fine motor skills?
I did not know this was possible. The hollow core motors of a Cheerson CX-10 can actually be opened, and a new wire can be soldered to the brushes when the original one broke of. This started as a challenge, me stating it was impossible to open these motors without damaging them beyond repair and…
