Year: 2022
-

Capacitieve koppeling
Bij mijn labvoeding merkte ik dat er naast de gewenste uitgangsspanning nog een andere spanning aanwezig was. De transformator vormt uiteraard een magnetische koppeling met het lichtnet, waarbij de spanning omlaag getransformeerd wordt. De naast elkaar liggende wikkelingen vormen echter ook een capacitieve koppeling. Dit veroorzaakt de extra spanning. Ook als voeding is uitgeschakeld, is…
-
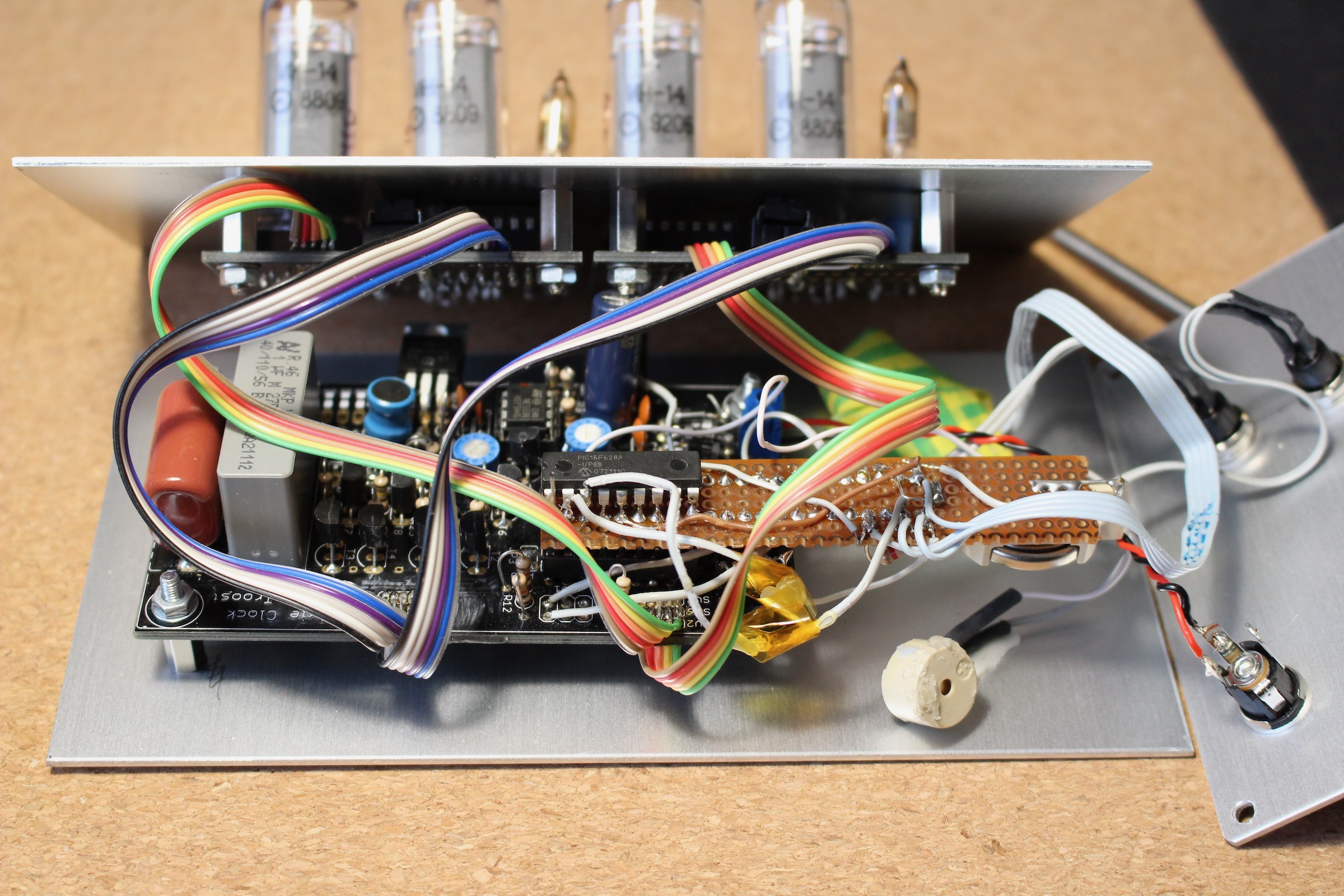
Nieuwe behuizing voor Nixieklok
Ergens rond 2008 bouwde ik in een nixieklok-bouwpakket. Er zat geen behuizing bij en ik koos destijds voor een doorzichtige kunststof voorraadbus die waarschijnlijk eigenlijk rijst, koffie, muesli of iets dergelijks zou horen te bevatten. Nu, bijna 15 jaar later, doen de nixiebuisjes het nog steeds prima. En eigenlijk verdienen ze wel een mooier onderkomen.…
-

Raspberry Pi als Radio-stream-ontvanger
Voor mijn vader heb ik met een raspberry Pi een radio (stream) ontvanger in elkaar gezet. Ontvangst via de kabel is gestopt, via de ether valt niet veel te ontvangen, en streams luisteren via de mediabox of smartphone was niet erg praktisch. Het is snel in elkaar geharkt op basis van een Raspberry Pi 2B…
-

Eenvoudige afstands-sensor met LED en lichtsensor.
Bij de zweefmagneet gebruik ik een hallsensor om de afstand tot de magneet te meten. Deze sensor meet magnetische veldsterkte en is daarom eveneens gevoelig voor het veld van de elektromagneet, en niet alleen de permanente magneet waarvan de afstand gemeten moet worden. Op zich geeft dat geen probleem in de praktijk, maar het is…
-
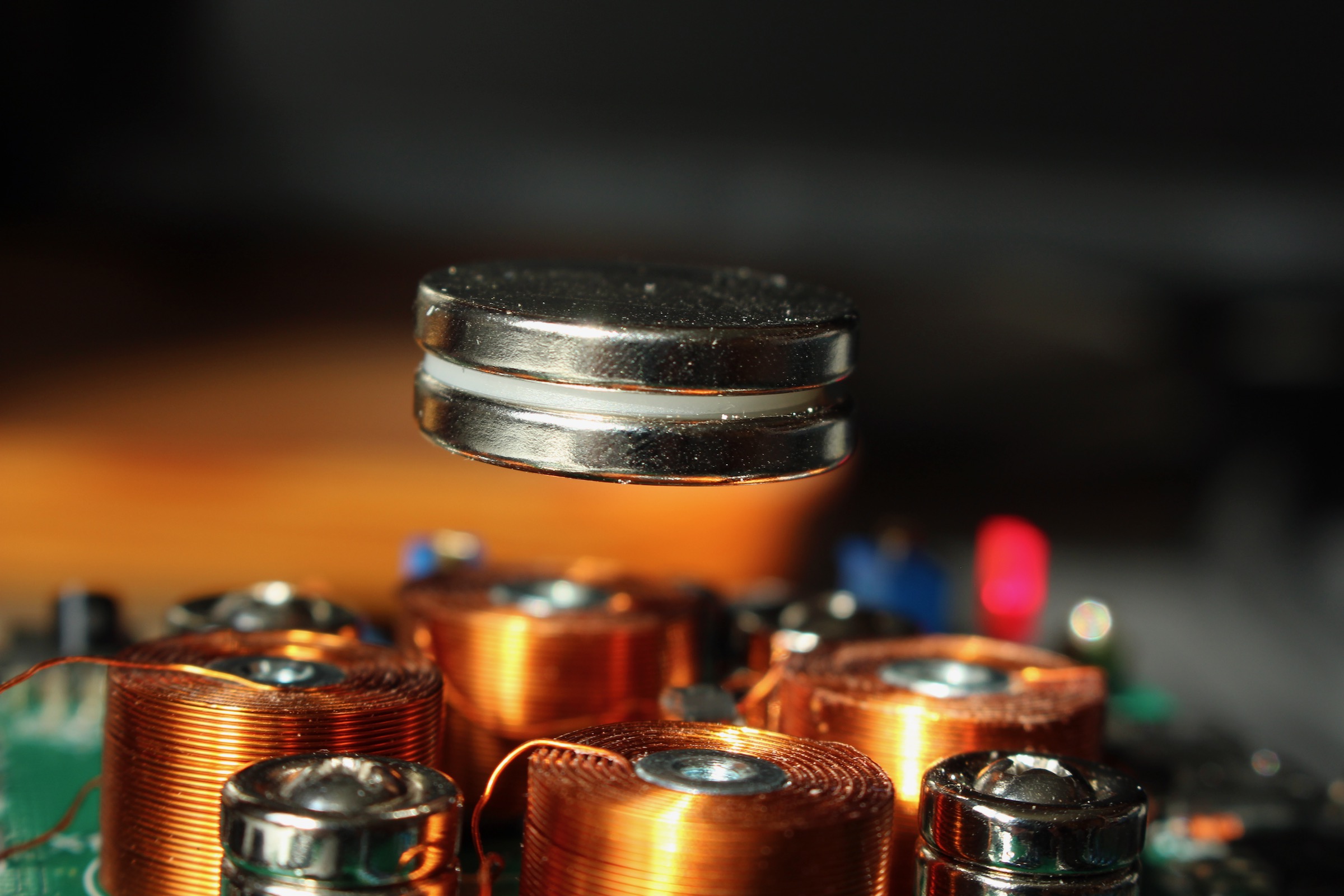
‘Inverse zweefmagneet’ bouwpakket gekocht en gebouwd
Wie mijn oude site kent, herinnert zich misschien nog wel de zweefmagneet. Daarbij zweeft een magneet onder een elektromagneet. Het kan ook andersom: een magneet boven een aantal elektromagneten laten zweven. Ik heb een bouwpakketje gekocht dat (na het in elkaar te knutselen) een magneet boven een stel elektromagneten laat zweven. Het bouwpakketje komt aan…
-

Nieuw lijmpistool
Daar er smeltlijm lekt op plekken,Waar geen lijm uit hoort te lekken,Bij de zijkant, hij staat zelfs bol,Kocht ik een nieuw lijmpistool.
-
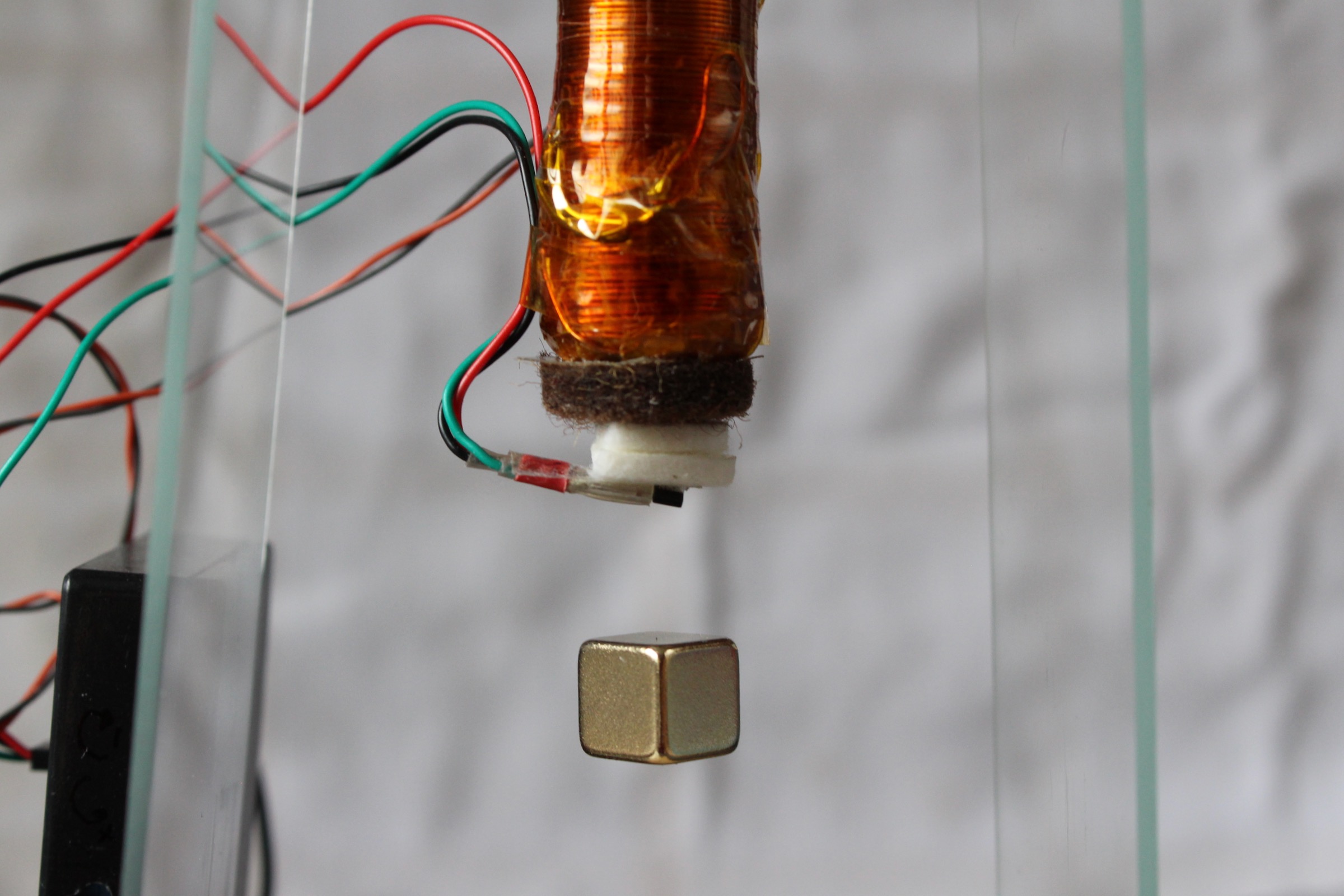
Zweefmagneet met opamps
Wie mijn oude site kent, herinnert zich misschien nog wel de zweefmagneet. Daarbij zweeft een magneet onder een elektromagneet. Daarbij wordt een sensor en een regeling gebruikt om ervoor te zorgen dat de magneet blijft zweven. Die regeling kan met een microcontroller, zoals het elektuur-artikel waar ik me destijds (in 2008 !) op baseerde. Het…
-
![[Opgelost] Camera snapt geen blauw en dat maakt jongleren lastig.](https://www.eluke.nl/wp-content/uploads/2022/04/IMG_3262.jpeg)
[Opgelost] Camera snapt geen blauw en dat maakt jongleren lastig.
Eerder postte ik iets over een probleem met blauwe led’s in rgb jongleerkubussen en rgb jongleerballen: mijn camera ziet specifiek dàt type blauwe LED als roze of paars maar niet als blauw. Het moeilijkste aan jongleren met jongleerballen die van kleur veranderen blijkt dan, dat de camera de kleuren niet snapt. Daar zijn natuurlijk allerlei…
-

Sjoelteller met Schiphol-display
Waar bij Casper en Hobbes alles mogelijk is met kartonnen dozen, door er op te schrijven wat het is, maakte ik er een sjoelteller mee. Of eigenlijk, met 1 van de schipholdisplays (Displays, afkomstig van de luchtverkeersleiding, die zijn afgedankt en bij de MakerSpace terechtkwamen). Voor dit type display heb ik een Arduino bibliotheek gemaakt…
-

Tulpje gelast (MIG)
Enige tijd geleden (nov. 2021, als ik in de metadata van de foto spiek) heb ik een tulpje gelast, in een spontane samenwerking met Millie, bekend van de leuke recycledieren. Ik moet het nog een keertje verven, dus ik heb het niet in de tuin laten staan, maar zet het wel op mijn blog. Ik…
-

Hoe droog houd ik mijn filament?
In deze blogpost laat ik zien hoe ik mijn filament droog bewaar en hoe droog dat dan wel ongeveer is. Het gaat uiteraard om filament voor de 3D printer. Ik bewaar dat met silicagel en ik heb er een humidity indicator kaartje bij gedaan. Want een vochtvreter is op gegeven moment verzadigd, en het is…