Day: September 18, 2022
-
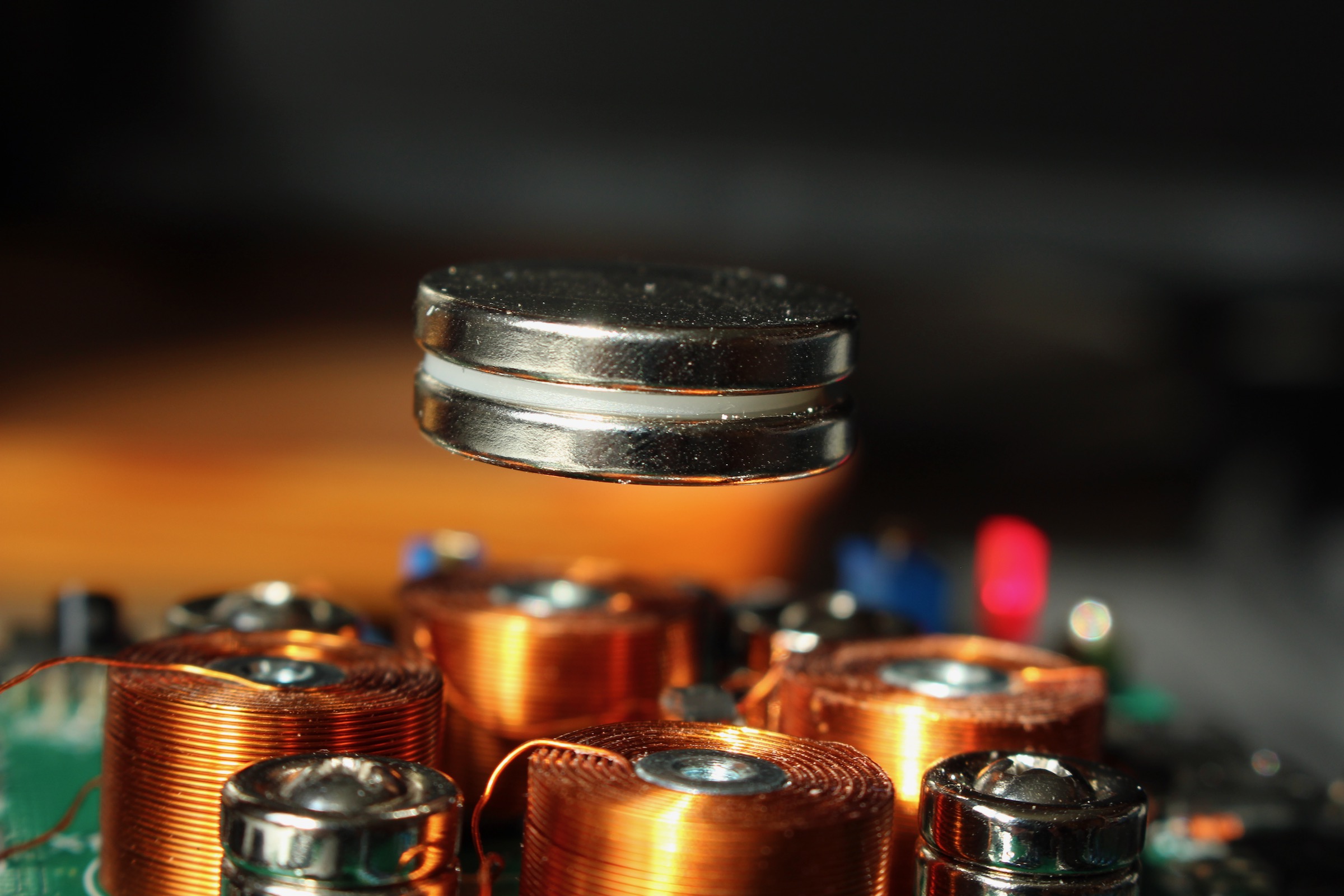
‘Inverse zweefmagneet’ bouwpakket gekocht en gebouwd
Wie mijn oude site kent, herinnert zich misschien nog wel de zweefmagneet. Daarbij zweeft een magneet onder een elektromagneet. Het kan ook andersom: een magneet boven een aantal elektromagneten laten zweven. Ik heb een bouwpakketje gekocht dat (na het in elkaar te knutselen) een magneet boven een stel elektromagneten laat zweven. Het bouwpakketje komt aan…