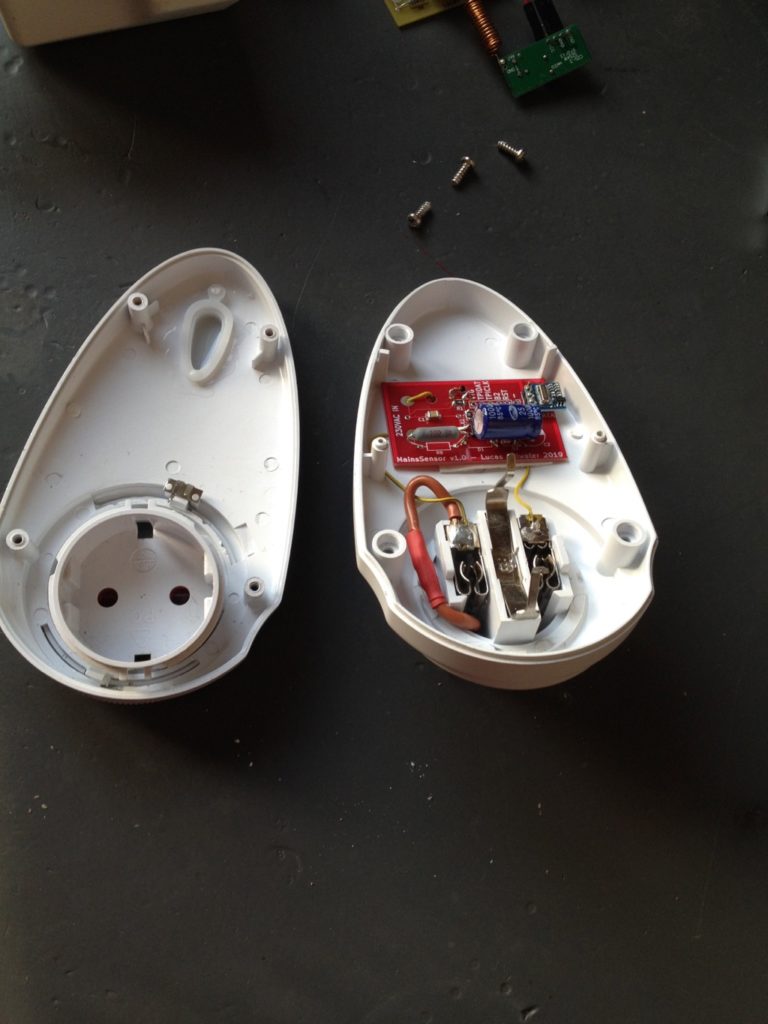
MainsSensor is een klein printje dat gebruikt kan worden om te monitoren of iets nog “aan staat” , bedoeld om in de MakerSpace bij de deur een reminder te geven als je als laatste weg gaat en b.v. de compressor staat nog aan. (Of een van de andere apparaten die uit moeten, b.v. ook de ruime kilowatt aan verlichting).
Voor wie niet de hele zooi wil lezen, staat onderaan een demonstratiefilmpje.
Het printje bevat een attiny10 en een 433 MHz zendertje. (Vanwege die Attiny10 was ik vorige post dus met een usbasp bezig, de AVR dragon kan geen TPI).
Als het printje voeding krijgt, stuurt het via 433 MHz een bericht met een uniek ID en de status “aan”. Dit bericht wordt af en toe (elke 30 seconden) herhaalt: “ik ben er nog”. (Het HI-bericht).
Als de voeding wegvalt, wordt hetzelfde ID verzonden, met de status “uit”. (Het BYE-bericht). Dit BYE-bericht wordt direct enkele malen herhaald, tot de bufferelco leeg is.
Wat ik leuke aspecten van het mainssensorproject vond:
- MainsSensor wordt rechtreeks uit het lichtnet gevoed*, via een seriecondensator. Voeding uit 12VDC is ook mogelijk.
- MainsSensor moet een bericht versturen als de voeding nèt is weggevallen.
- Het moet compact (Om er nog bij te passen in de bestaande behuizing van eender welk apparaat), dus:
- de antenne voor de 433 MHz zender zit op de print ge-etst.
- Spelen met een attiny10 in SOT23-5 (microcontroller, indeed! Dat ding is klein.)
Het schema en de software staan op github.
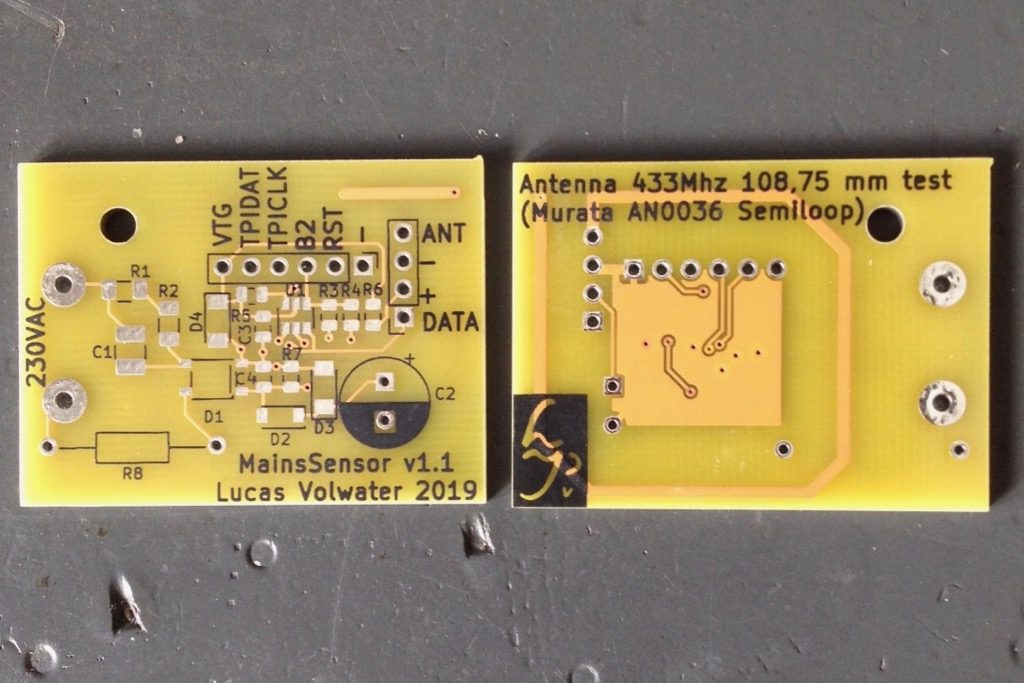
C1 is de seriecondensator, 47nF / 630VDC X7R in 1210 behuizing. Deze begrenst de stroom op ongeveer 3,2 mA. (Dergelijke ceramische SMD condensators in andere waarden worden ook toegepast als seriecondensator in ledlampen, lekker compact.) (In deze discussie op circuitsonline.net wordt over een dergelijke schakeling gefilosofeerd). R8 van 1k beperkt de inschakelstroom (en eventuele kortsluitstroom mocht C1 falen), en omdat dit een flameproof / fusible weerstand is fungeert deze ook als zekering.
Met die 3 mA wordt de bufferelco C2 geladen, waaruit de 433 MHz module wordt gevoed. Met een 12V zenerdiode D3 wordt de spanning begrenst op 12V. (De stroom verdeeld zich in de laadstroom voor de bufferelco, het gebruik van de schakeling, en de zenerdiode. Als de schakeling de 3 mA niet opmaakt, zal de bufferelco opladen tot de 12V bereikt is, daarboven gaat de zenerdiode geleiden). Via R6 en 5V zener D4 wordt 5V gemaakt voor de microcontroller.
Vòòr C2 zit D2, zodat vòòr D2 gemeten kan worden of de voeding wegvalt, zonder dat de bufferelco eerst leeg moet zijn om hier geen spanning meer te meten. Die buffer is immers nog nodig om de schakeling te voeden om een “uit” bericht te sturen. C4 vlakt de te meten spanning af, R7 is hiervoor de belasting zodat C4 ontladen wordt als de voeding wegvalt. R3/R4 zijn een spanningsdeler.
C3 is 10 uF ceramisch, dicht bij de microcontroller als ontkoppeling, en tevens als buffer na R6. (Anders zou er een elcotje na R6 over D4 gestaan hebben, en 100nF ceramisch naast de micro – 10u ceramisch is compacter).
Voor het berekenen van de bufferelco is een schatting gemaakt: er is van uitgegaan dat het versturen van een bericht 1/40 s duurt en 30 mA gebruikt. De bufferelco mag daarbij maximaal iets van 3 V dalen en moet dus minimaal I*dt/dV = 334 uF zijn. Om meerdere berichten te kunnen versturen en de tolerantie van een elco op te vangen is er 1000 uF geplaatst. In de praktijk voldoet dit uitstekend, ook al wijkt de daadwerkelijke tijdsduur en het stroomgebruik af van de inschatting, het goodbye-bericht kan ruim 2 seconden lang herhaalt verstuurd worden. (In het stadium van het project dat ik deze schatting maakte, noemde ik het nog MainsSpy en dacht ik nog Hamming(7,4) encoding toe te passen. Zie whiteboardfoto. Maar omdat het doel juist geen big-brother-robotnanny-spionage is maar een hulpje om dingen uit te zetten, heb ik het hernoemd naar MainsSensor. En forward error correction is hier niet nodig, dus geen Hamming(7,4). )
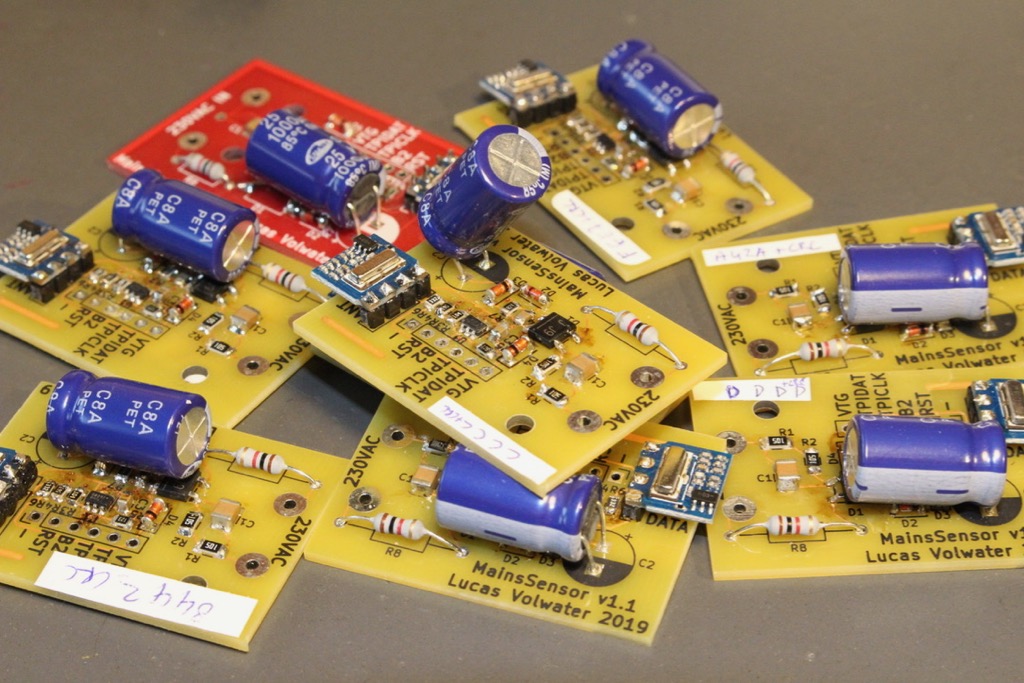
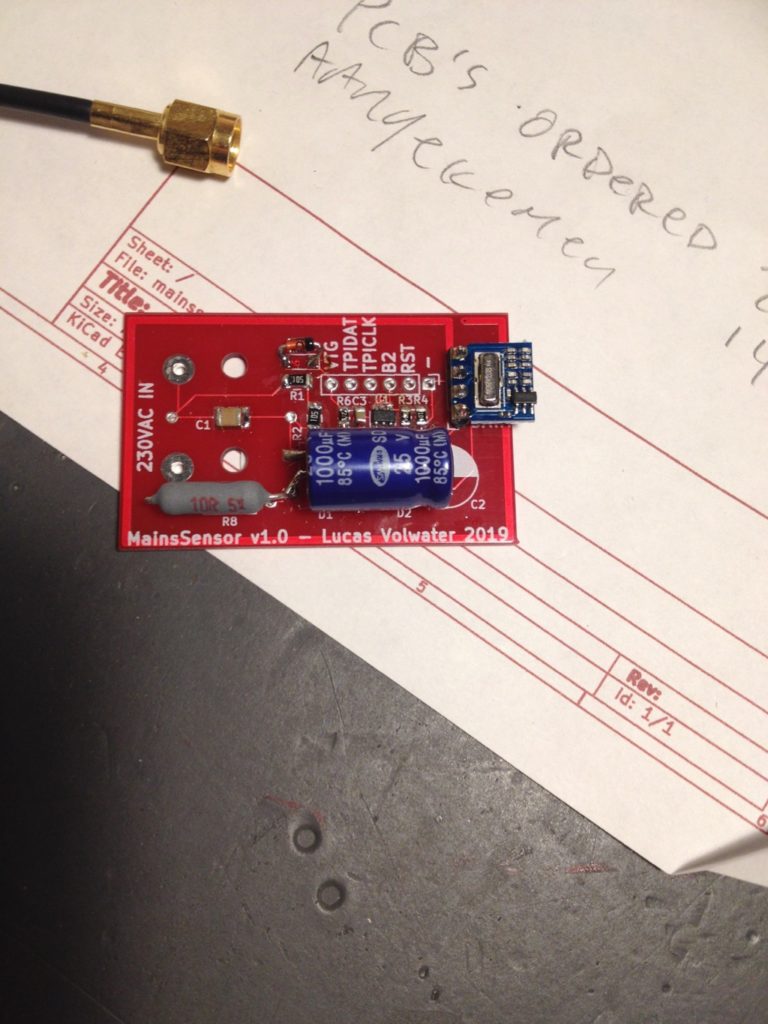
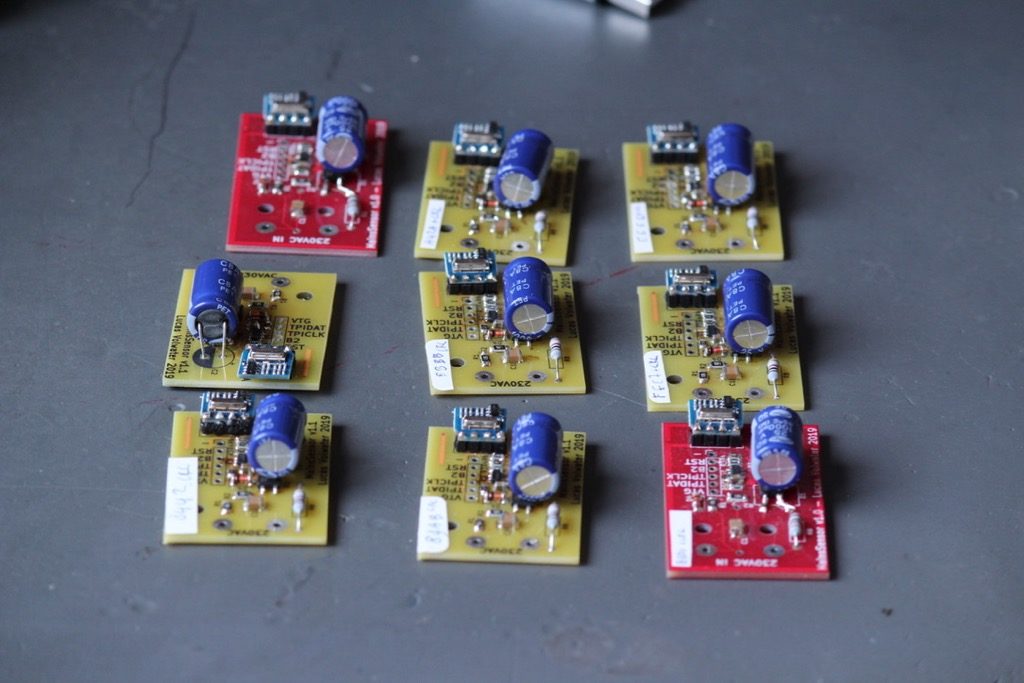
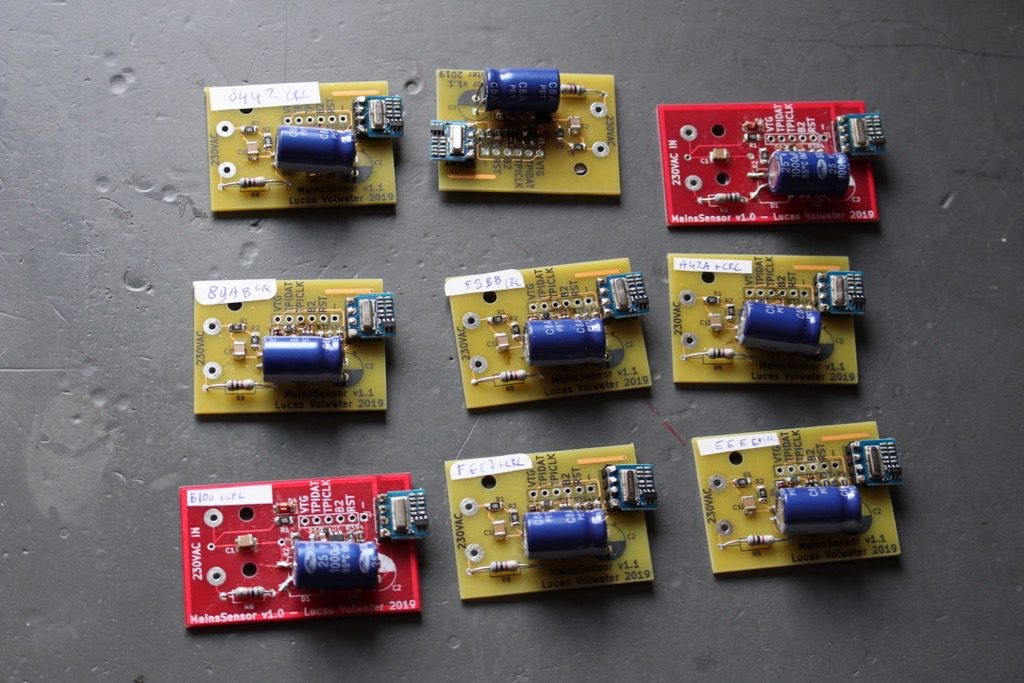
Dan de PCB antenne. Hiervoor heb ik me gebaseerd op een appnote van Murata (AN0036). Ik heb 2 PCB ontwerpen gemaakt, bij de eerste poging (rode printjes, V1.0) was de antenne veel te lang. Dat liet zich goed meten met de VNA (VNAart :)). Van de rode printjes met te lange antenne kan deze worden ingekort door het printspoor door te krassen, waarna opnieuw met de VNA gemeten kan worden wat de antenne-eigenschappen geworden zijn. De antenne van de gele printjes (v1.1) is ook iets te lang, maar minder dramatisch.
De meetresultaten variëren van exemplaar tot exemplaar, waarbij ook de veranderende eigenschappen van de veranderende meetopstelling meespelen, maar rekening houdend met dat voorbehoud: de antenne van de rode printjes resoneert op ongeveer 334 MHz, de SWR is daar ongeveer 3,9:1. Op 433 MHz is de SWR ongeveer 13:1. (meting 190609 153659). Met het inkorten van de PCB antenne op het rode printje wordt deze veel gevoeliger voor andere objecten in de buurt, maar kan deze bijvoorbeeld (meting 190609 155321) uitkomen op een resonantiefrequentie van 442 MHz met een SWR van 1,8:1 – de SWR op 433 MHz was ongeveer 2:1.
De nieuwe gele V1.1 printjes hebben (meting 190702 190935) een antenne met een resonantiefrequentie van 449 MHz, de SWR is daar ongeveer 2,5 :1. Op 434 MHz is de SWR ongeveer 4:1. Dat is dus stukken beter dan de 13:1 van een ongemodificeerd rood printje.
Verder bleek bij het schrijven van de software dat 32 bytes RAM toch wat weinig is. Het ID in ram werdt overschreven in de interrupt routine (ISR). Daardoor werdt ook dit aspect van het project interessanter dan voorheen gedacht.
Oorspronkelijk stond het ID hardcoded en was vrijwel alles al bekend bij compile time. Omdat de attiny10 zuinig moet zijn, loopt deze op een trage (128 kHz) klok. Tijdens het verzenden van een bericht beslissingen maken zou de timing verstoren, dus het te versturen bericht werdt tevoren in ram klaargezet. Er worden HI-berichten verstuurd zolang de sensor (en het apparaat) aan staat, en BYE-berichten als het apparaat (en de sensor) wordt uitgezet.
Later is een crc toegevoegd, waardoor er wat meer ram gebruikt wordt, hetgeen ertoe leidde dat de stack het ram in groeide bij de context switch bij de (pin change) interrupt die gebruikt wordt om te meten of de voeding is weggevallen, met dus als gevolg het overschrijven van de variabele met het uit-te-zenden bericht.
Omdat het niet erg is als de microcontroller reset en opnieuw begint bij het terugkomen van de spanning, heb ik ervoor gekozen de ISR zonder context save / restore uit te voeren (“naked” ISR). Om de microcontroller gegarandeerd te resetten, ook als de voeding terugkomt voordat de bufferelco leeg is, wordt bij het ingaan van de ISR de watchdog timer (WDT) op 2 seconden ingesteld. Zodoende wordt de microcontroller 2 seconden later gereset. Er is dus geen context restore en return from interrupt. Dit scheelt 13 bytes ram (van de 32).
De software aan de ontvangstkant is onder te verdelen in een aantal lagen:
- De ontvangstlaag (datalinklaag)
- De verwerkingslaag (Applicatielaag)
- De presentatielaag
De ontvangslaag verwerkt de ontvangen bits tot berichten, die doorgegeven worden aan de verwerkingslaag. De verwerkingslaag slaat de ID’ s en de status van de ontvangen sensoren op. De presentatielaag haalt hier de naam van het apparaat bij en toont deze informatie.
De ontvangstlaag is een state-machine rond een timer-interrupt die de ingang polled om de startconditie van een bericht te detecteren. Eenmaal een startconditie gevonden, wordt een pin-change interrupt gebruikt om de rest van het bericht binnen te halen.
De verwerkingslaag slaat het ID op, en houdt bij welke apparaten nog aan staan d.m.v. een timestamp en de BYE-berichten. Als een apparaat zich niet afmeld met een BYE-bericht wordt het als “uit” beschouwd als er enige tijd (anderhalve minuut) geen HI-berichten meer ontvangen zijn.
De presentatielaag geeft de informatie over wat er nog aan staat weer via een seriële verbinding en op een LCD. Op het LCD worden ook de ingestelde namen van apparaten getoond. De naam/ID koppeling wordt opgeslagen in het EEPROM van de atmega328.
De code van zowel de zenderkant als de ontvangstkant is ruimschoots voorzien van commentaar, dus bij verdere interesse in de werking: kijk op github.
Voor wie geïnteresseerd is in de berichtstructuur, is deze op de MakerSpace Wiki gedocumenteerd. Ook alle andere documentatie staat daar.
Mocht het hierboven ingesloten filmpje niet laden is hier de link naar youtube.
En voor wie verder nog vragen of opmerkingen heeft, is onder deze blogpost een reactiemogelijkheid 🙂
*) De bijna verplichte waarschuwing: Let er dus op, mocht je dit nabouwen, dat de hele schakeling met het lichtnet verbonden is. De 5 VDC voor de microcontroller is dus, ten opzichte van aarde, nog steeds 230 VAC. Er is geen isolatie, en als je de “5V” zou aanraken, raak je 230 V aan. Niet doen dus. (Ditzelfde geldt voor de 12V).
Leave a Reply